V
主页
激光雷达 摄像头 显示屏 32驱动板
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
树莓派夜视摄像头教学视频
【电路飞翔】电子设计从零开始02
焊锡测试 -有铅PK无铅
从 IOS 到 ROS 的最简IKEv2配置
ROS机器人金属履带机器人底盘随动轮子安装
百日破针-妇幼保健院惊现偷拍摄像头(拆除成功)
【类型、课程】平衡小车与电机 PID (从电机PID到小车站起来)
无人机飞控 软件+硬件设计
Cozmo机器人安卓版本下载安卓说明
轻松安装STM32 USB Bootloader
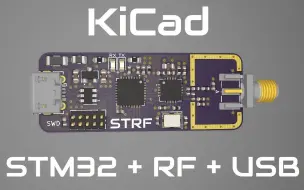
【KiCad】 STM32 + RF + USB硬件设计
扑翼机飞行测试
ROS 路径规划控制
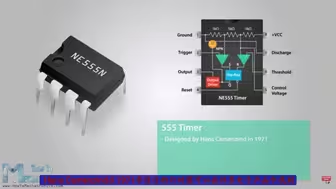
555定时器工作原理
Diy Arduino自平衡车
【开源教程】ROS驱动程序控制舵机(源码资源链接在简介)
贴片元件焊接 - 最小封装
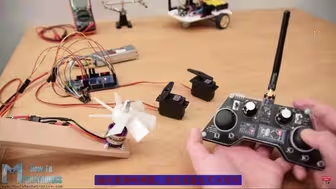
DIY Arduino 遥控器
【开源无人机】从零调试一架开源无人机M0-F250
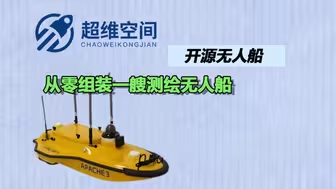
【开源无人船】从零组装一艘测绘无人船
7.2无人机PID参数调试
速度、直立、转向控制调试教程
树莓派人工智能机械臂控制
arduino机器人
自动驾驶入门技术全栈实战解析-1-感知篇
微型无人机电磁舵机制作
ROS控制 | 小车底盘控制讲解
为什么一定要遮住电脑摄像头?
MiniBalanceV5.0【Arduino版】平衡小车测试视频教程
ROS机器人——金属履带机器人底盘安装
ROS图像|第二轮分站赛代码编程思路
Ros机器人金属履带机器人底盘底盘随动轮子组装
树莓派2自由度摄像头教学视频
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【AE】玻璃隧道制作解析说明
【开源无人机】无人机各飞行模式讲解
25考研结束了!写了几百天的教育学卷子密密麻麻…走出考场那一刻,我才恍然大悟…
树莓派语音助手
使用Isaac Sim和ROS2控制机器狗指南
ROS控制 | 第二轮分站赛qr功能包和语音使用讲解