V
主页
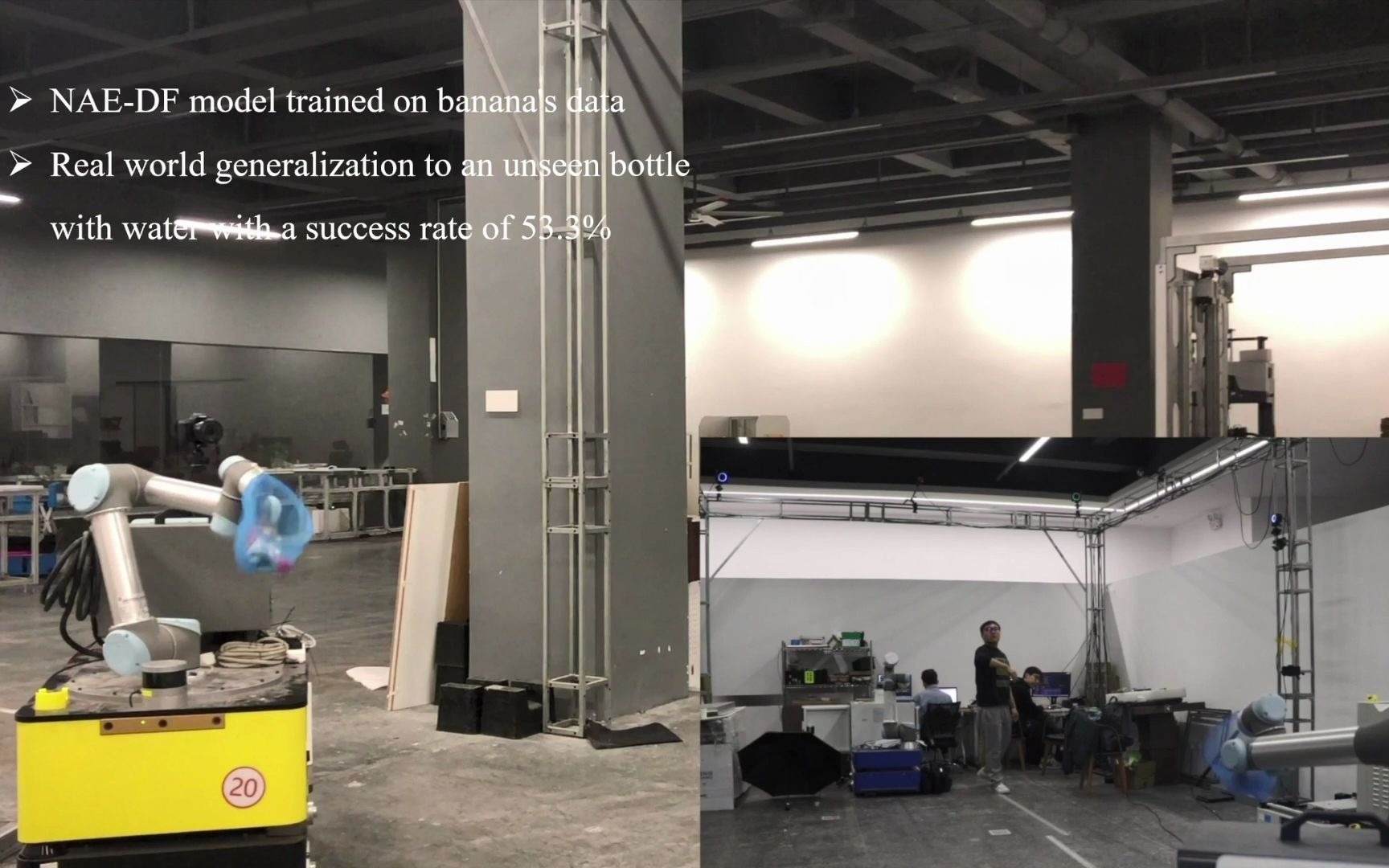
基于神经网络的不规则物体飞行轨迹预测
发布人
论文地址:https://ieeexplore.ieee.org/abstract/document/9635983 数据集地址:sites.google.com/view/neural-motion-prediction IROS 2021 接收 贡献:飞行物体的捕获极具挑战,需要在数十毫秒内依次完成轨迹预测、拦截位置计算和运动规划。我们引入了神经加速度估计器,通过观察先前一小段飞行轨迹来估计变化的加速度。而后使用微分滤波器进行端到端训练进一步提高预测准确性。实验结果表明,我们的方法进行运动预测优于现有方法,对没见过的物体也有好的泛化性能
打开封面
下载高清视频
观看高清视频
视频下载器
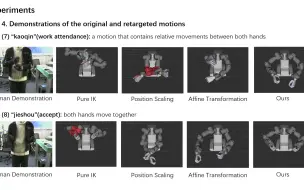
基于神经网络隐空间优化的从人到机器人动作迁移
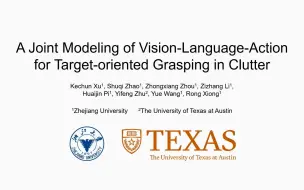
基于视觉-语言-动作联合建模的杂乱堆叠场景目标物体抓取
基于动态运动基元的双臂手语动作人机对应方法
基于监督学习的分层驾驶模型:从连续意图到连续轨迹
“星期三”开箱大揭秘!
我和我的机器人孪生兄弟
AIBI POCKET PET 口袋智能机器人
机器人你个学人精!
基于关键帧地图的一致性无漂移视觉惯性定位算法
全面拟人机器人,超谦虚的OrcaⅠ,直膝行走so easy
梅卡曼德3D视觉引导小型三通阀深筐无序抓取
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
AI辅助驾驶支气管镜机器人系统
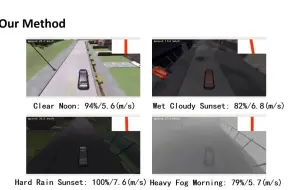
域泛化的驾驶轨迹生成
AGV智能搬运机器人转运物料
大型纪录片《二白成精》持续为您播出!
基于时间优先规划的物体任意目标姿态转移
杂乱堆叠场景下面向目标的推抓协同学习
今天机器人跑起来了吗?快了!
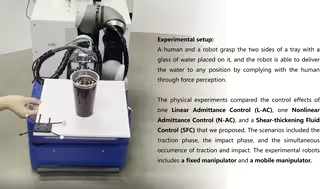
SFC控制器赋能人机协作:移动操作机器人在动态工厂环境下的协作性能展示 IJRR-video2
顺应且抵抗:用于物理人机交互的剪切增稠流体控制器 IJRR-video1
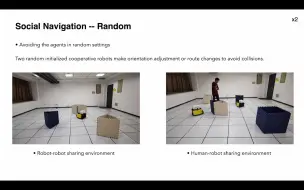
基于图像隐变量模型的强化学习社交导航算法
基于力反馈的主动探索与亚毫米级孔定位
人工智能机器人正变得过于人类化:奇点的最初迹象!
【奥核 全自动变形】J20 改 “白帝 Shadow”量子战影机甲 特摄展示
应用于机器人全局定位与绑架问题的深度可采样观测模型
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
新ATLAS人工智能机器人现已完全自主(震惊了专家)
基于频域特性的可估方向激光描述子
原来机器人里面也有人贩子,几句话就能拐跑一大批机器人。
调机日志回归!机器人直膝拟人行走
Go ahead and do it
梅卡曼德高精度电芯拆码垛
自评估机器人任务的错误可知策略学习
导师:实验机器人也能做,你说要你有什么用?
比赛首秀!来看看现场爱机的直膝行走
复合机器人搭载2D视觉相机对Mark识别定位
PI:通用机器人控制的VLA流模型
机器人智能管家就在眼前了,通用类脑智能机器人灵宝CASBOT正式发布,能做饭换灯泡拧螺丝,每个家庭的机器人管家真的要来了!
重生之我是AGV