V
主页
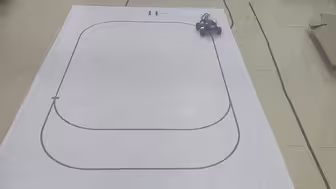
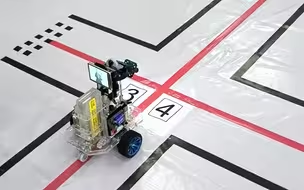
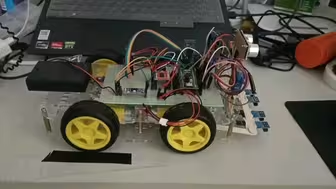
【基于STM32循迹小车】优化直角转弯。
发布人
需要做功能加主页q。基于STM32循迹小车,优化直角转弯。
打开封面
下载高清视频
观看高清视频
视频下载器
大一 第一次实现直角转弯
多路口循迹,arduino循迹小车,可以循迹直角,十字路口,丁字路口,S弯,锐角等,用了8路循迹,
寻迹小车4驱动90度寻迹转弯!
五路红外循迹小车演示,可给代码
基于51单片机的工训红外循迹小车 可直角转弯,可自定义轨迹
2路红外循迹小车,实现直角转弯,原理及代码介绍
[记录]STM32陀螺仪控制小车走直线,90度转弯 初探还不怎么会用,后面尝试一下闭环PID控制,以后用到的地方挺多,希望能用上。
51小车小跑一下,过圆弧,直角和十字路口,定点停车
三轮小车精确旋转90度+走直线
openmv巡边界线,陀螺仪直角转弯及走直线。2023工训自制原型机。
普普通通的循迹小车
51循迹小车竟然这么简单?
stm32红外循迹小车--如此简单【源码回复关键词获取】
3路红外循迹小车,原理图和代码介绍,3路红外探头三角形分布
高速循迹小车
2路红外循迹小车,3种转向方式对比。
【PID寻迹小车】调参调到吐了,有直线、直角、锐角、圆弧转弯,基于STM32两轮差速小车。
【开源】PID循迹小车2
STM32循迹小车,跑图第二天
【Arduino】循迹小车(完全开源)
【零基础】循迹小车这么简单?包教包会,一定成功学会寻迹小车!
【PID】STM32F103C8T6循迹小车
51循迹智能小车,跑完全程只用8秒!!!
STM32单片机PID循迹小车
六轴角度#传感器 模块“控制小车走直线、转弯”
[开源]两小时手把手教你制作stm32电赛寻迹小车/蓝牙小车/避障小车
智能小车 寻电磁线 入环 拐直角弯 停车 加减速 探测功能 自动探测范围是5cm-4m之间的障碍物 测量障碍物的精度:2cm
关于如何使用七路寻迹跑出丝滑的弯道,其他数量也适用,循迹逻辑分享。
【智能车】循迹/避障/PID算法控制 技巧
小车:我彳亍在这寂寥的锐角转弯
智能小车制作教程(基于stm32)
用PID技术控制小车跑直线
巡线小车要拐了! 第一部思路 第二部程序详解
STM32小车运动、循迹、避障---超详细程序讲解!!!【代码免费开源】
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
【有手就能做】轻松DIY循迹小车
【零基础】浅聊一下循迹小车 原理+材料 小白都能听懂
PID寻迹小车
4路红外循迹小车,原理图和代码介绍,略微提速
【单片机课设/毕设】51单片机智能小车(寻迹、避障、蓝牙)详细教程(基础版)