V
主页
京东 11.11 红包
Control Systems Lectures - LTI Systems
发布人
Control Systems Lectures - LTI Systems
打开封面
下载高清视频
观看高清视频
视频下载器
高增益观测器High-Gain Observers in Nonlinear Feedback Control (Dr. Hassan Khalil) P2
Why Learn Control Theory
多机器人系统协同Cooperative Multi-Robot Systems (Dr. Jeff Shamma)
Bode Plots by Hand Complex Poles or Zeros
Distributed Control of Energy Management Systems
The Laplace Transform - A Graphical Approach
高增益观测器High-Gain Observers in Nonlinear Feedback Control (Dr. Hassan Khalil) P1
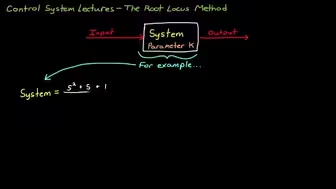
The Root Locus Method - Introduction
Nyquist Stability Criterion Part 1
Lyapunov Matrices for Time-Delay Systems
Introduction to the Fourier Transform (Part 2)
Disturbance Observer Based Control for Mechatronic System with State Constraints
Sketching Root Locus Part 2
01-01 Introducing MultiAgent Systems
02-05 Agents as Intentional Systems
分布式优化Distributed Optimization over Networks (Dr. Maria Prandini)
01-03 Agents and MultiAgent Systems A First Definition
01-05 Objections to MultiAgent Systems
Naomi Leonard on Collective Motion and Sensing Networks
[IEEE-JSAC-2024]异步定位与编队Asynchronous Localization and Formation Control
03-04 Concurrent Metatem - A Logic-based Multi-agent Programming Language
多智能体系统控制 第五章 线性系统的一致性算法设计(二阶积分器) 01
02-06 A Formal Model of Agents and Environments
02-03 Objects and Agents
【MIT中国峰会】Dina Katabi
02-04 All About an Agent's Environment
大师谈阿里巴巴全球数学竞赛
[LeetCode] 1010. Pairs of Songs With Total Durations Divisible by 60 总持续时间可被 60
[LeetCode] 48. Rotate Image 旋转图像
03-02 Deductive Reasoning Agents
03-03 Agent Oriented Programming and Agent0
02-08 How to tell an agent what to do (without telling it how to do it)
什么是伪学霸?
【MIT中国峰会】探索人工智能
02-02 Properties of Intelligent Agents
02-01 Agent and Environment_ The Sense-Decide-Act Loop
[LeetCode] 415. Add Strings 字符串相加
[LeetCode] 334. Increasing Triplet Subsequence 递增三元组子序列
【MIT中国峰会】Daniela Rus
使用非线性鲁棒控制和模块化屏障功能的无人机安全运行