V
主页
京东 11.11 红包
Contact-rich robotics: learning, impact-invariant control, and tactile
发布人
https://www.youtube.com/watch?v=yPd1Pk2PTNw&ab_channel=MITRobotics MIT - September 24, 2021 Michael Posa "Contact-rich robotics: learning, impact-invariant control, and tactile feedback" Assistant Professor, University of Pennsylvania Department of Mechan
打开封面
下载高清视频
观看高清视频
视频下载器
Contact models for the design of robotic grasping and manipulation_ Hannah Stuar
Robotics Pathways & Careers- Kimberly Hambuchen, NASA
MIT Robotics - Russ Tedrake - Planning with Graphs of Convex Sets (in the age of
Robotics: Science and Systems 2022 Conference
Generic and Generalizable Manipulation Skill Benchmarking and Learning - Hao Su
Softbank How Large Companies Approach Robotics
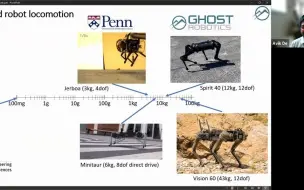
Design and control of insect-scale bees and dog-scale quadrupeds
IROS 2022 Keynote- Safe Learning in Robotics by Prof. Angela Schoellig
ICRA 2021 -Robert Wood:Soft Robotics for Delicate and Dexterous Manipulation
MIT RoboSeminar - Oliver Brock - Why I Believe That AI-Robotics is Stuck
Workshop - Closing the Perception-Action Loop with Vision and Tactile Sensing
Rehabilitation and Assistive Technologies based on Soft Robotics (SofTech-Rehab)
Contoro Robotics Introduction
Castor Oil-based Elastomers for Sustainable Soft Robotics
ONLINE Lockheed Martin Robotics Seminar, November 13, 2020- Dezhen Song
RI Seminar- Kevin Lynch - Robotics and Biosystems
The Natural Robotics Contest
Spring 2024 GRASP Robot Learning by Understanding Egocentric Videos
Perceptual Robot Learning
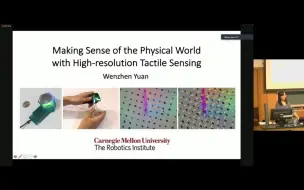
Making sense of the physical world with high-resolution tactile sensing- Wenzhen
The Physical World with High-Resolution Tactile Sensing - Wenzhen Yuan, CMU
MIT Robotics - Marco Hutter - Robots in the wild
Arash Ajoudani - Shared authority control of a MObile Collaborative robot Assist
Machine Learning and Model Predictive Control for Adaptive Robotic Systems
GRASP Lab Days 2022 - Collaborative Human-Aware Robotics
Programming for Robotics
ICRA 2020 Fourth Machine Learning in Planning and Control of Robot Motion Works
Get in touch Tactile perception for human-robot systems - Veronica Santos of UCL
Stanford Seminar - Representation Learning for Autonomous Robots
Wearable assistive robotics with integrated sensing
ICRA 2021 Plenary Talk -- Robotics and Automation in Micro & Nano-Scales
SPRING 2022 GRASP on Robotics - Kevin Lynch, Northwestern University
Meet BirdBot, an energy-efficient robot leg - published in Science Robotics
CS287 Advanced Robotics at UC Berkeley Fall 2019 -- Instructor: Pieter Abbeel
Towards Closing the Perception-Planning and Sim2Real Gaps in Robotics
ICRA2020 Workshop - Learning of Manual Skills in Humans and Robots
Learning Quadrupedal Locomotion over Challenging Terrain
FALL 2021 GRASP on Robotics Ryad Boseman, Universiy of Pittsburgh
TRI EXPO Robotics