V
主页
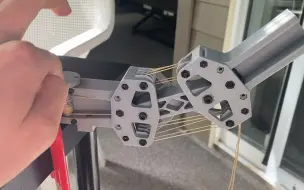
基于4自由度球面并联机构的机器人腿概念设计
发布人
https://www.youtube.com/watch?v=uv-Qp8p8Jqg causeim@gmail.com 常规图片: https://pin.it/pnZfSNP 坐姿图像: https://pin.it/5cEraUo 机器人手臂图片: https://pin.it/1UbxzOH
打开封面
下载高清视频
观看高清视频
视频下载器
四足机器人的腿部机构
3D打印结构件仿造LIMS2-AMBIDEX机器人的关节
3D打印AMBIDEX机器人腕关节结构件
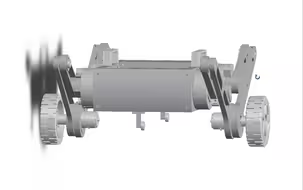
并联轮腿式移动机器人——平衡步兵
SELDA驱动的机器人腿跳跃|2022【IROS】
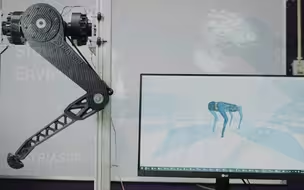
四足机器人用单腿模拟环境的演示
一条来自关节模组的压迫感
轮式双足机器人制作花絮
这的确是有创意的发明,在欧美十分受欢迎,国内咋没有呢
人形机器人,并联结构Whole-Body Control of Series-Parallel Hybrid Robots
四足机器人单腿测试
串联并联混合式RH5仿人机器人的设计、分析与控制
重力补偿装置
机甲骨骼机械手
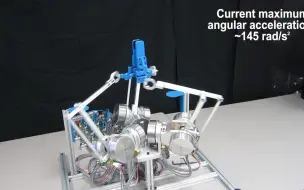
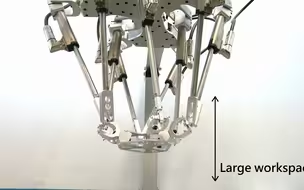
韩国机器人实验室研发的超高爆发力仿生腿
单腿跳跃机器人SALTO第2弹[2019.05][SALTO - Teaching an old robot new tricks]
并联机构-轨迹跟踪
并联机构的静平衡
球面并联(灵巧眼)
八面体六足机构并联机器人
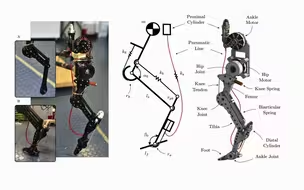
开源仿生机器腿|2021【密歇根大学】
串联和并联机器人运动学与动力学分析
Delta并联机构,看完这个你应该可以复现出来
Arduino的弹跳机械腿
并联机构 6+3
仿生机械手的设计2
设计了一个全关节机械转动结构,这才叫灵活!
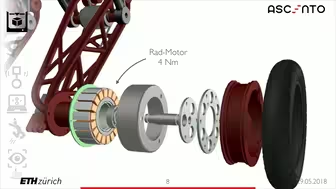
两足机器人 会蹦会跳 原理说明ascento
这种球形齿轮,一定会成为未来机器人的重要关节结构部分
并联绳驱机械手
【搬】Stanley无刷狗起跳慢动作
无刷腿设计欣赏
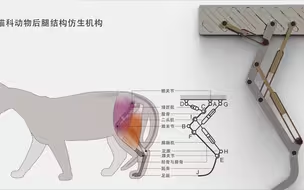
猫科动物后腿结构仿生机构
【搬】基于倒置同步带设计的差速机器人关节欣赏
【搬】逆运动学效果很好!
开源项目:3D打印制作—球形并联机械结构
基于绞盘机构的无刷四足之单腿弹跳测试-Artysta Automatyk
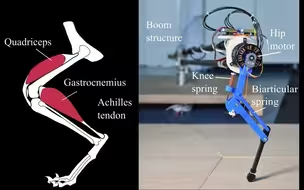
跳跃式机器人腿的双关节肌腱结构
做机器人有必要了解下这种机构
美国又造神器,HULC人体负重外骨骼问世