V
主页
京东 11.11 红包
3次多项式_5次多项式插值法_353多项式六自由度机械臂轨迹规划多项式关节空间算法
发布人
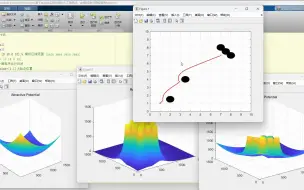
3次多项式_5次多项式插值法_353多项式六自由度机械臂轨迹规划多项式关节空间算法 三种多项式算法 (1)353多项式 (2)3次多项式 (3)5次多项式插值法 可以运用到机械臂上运动,并绘制出关节角度,关节速度,关节加速度随时间变化的曲线。此外还可带入自己的机械臂模型绘制末端轨迹图
打开封面
下载高清视频
观看高清视频
视频下载器
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
机械手臂1~4
机械臂笛卡尔空间位姿插补
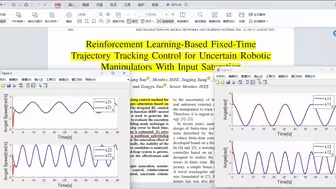
基于强化学习的机械臂固定时间轨迹跟踪控制仿真【复现】
空间机械臂关节驱动器
【开源教程】ROS+PX4开源机械臂控制(下)
STM32十种常见采样滤波算法【限幅滤波法、中位值滤波法、算术平均滤波法等等】
基于matlab实现改进的人工势场法,apf算法进行路径规划,通过改进斥力函数和引入模拟退火算法,克服局部极小值和目标不可达问题
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
把玩 HybridAstar -- 双向搜索初步
225 机器人码垛和物流仓库
234 完整码垛系统
PiPER机械臂开箱视频来了!解锁首次使用PiPER的正确方式!
如何在摄像头中精准定位物体的像素坐标
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
这机械臂速度可以干活了吧、、
A星+DWA算法融合路径规划(动态+静态避障)
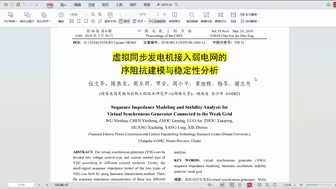
弱电网下虚拟同步发电机正负序阻抗建模仿真【复现】【扫频发+阻抗建模】
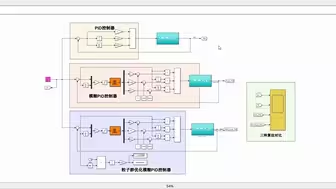
基于粒子群优化模糊PID_模糊PID_传统PID三种控制算法对比仿真
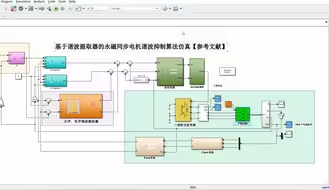
基于谐波提取器的永磁同步电机谐波抑制算法仿真【参考文献】
stm32自制机械臂+蓝牙控制
虚拟同步发电机自适应控制策略仿真
3题秒懂插值法做证明题,多项式法【小元老师】
机器人末端夹爪
遥操作孪生协作臂
基于自适应控制算法的永磁同步电机位置环算法
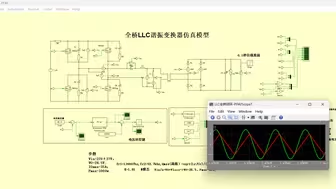
Plecs全桥LLC谐振变换器仿真模型
法奥FR3 物块抓取案例 ROS MoveIt
Dummy2 机械臂全新升级谐波无刷电机版 - 开箱指南之一 软件部分一
【开源教程】ROS+PX4开源机械臂控制(上)
结合粒子群算法的永磁同步电机多参数辨识仿真
高精度手眼标定效果展示(法奥FR3+奥比中光Gemini335)
我跟你们这群研究机械臂的拼了!竟然连体感追踪都整上了
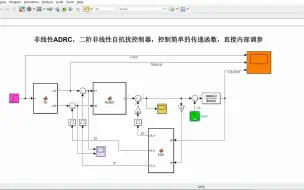
非线性ADRC,二阶非线性自抗扰控制器
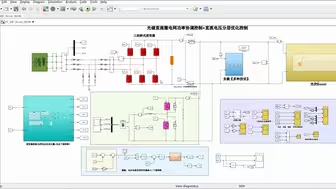
光储直流微电网功率协调控制+直流电压分层优化控制【附参考文献】
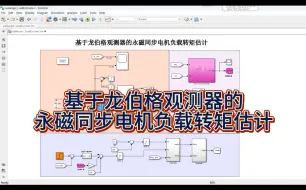
基于龙伯格观测器的永磁同步电机负载转矩估计
229 海绵吸盘能干什么
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
开源超低成本谐波减速,文件分享在评论区。
全桥LLC谐振(变频+移相混合控制)变换器闭环仿真模型