V
主页
就是调试一个磁定向控制,不符合预期,后续会重新优化软硬件,做个预告。后续开源
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
FOC磁定向矢量控制到底什么波形,实测呈现,后续需要进一步把硬件优化下,对无刷电机得控制,还是有点兴趣
BGM过大,重新优化,科技与狠活,稚晖君DUMMY核心硬件手动焊接,调试,问题定位,解决,给你一个详细的硬件调试指南 。硬件告一段落,开启下一段冒险
985本硕转行新能源汽车电机控制建议之嵌入式以及手把手带你光速入门嵌入式直播预告
Dummy关节调试,关节组装,后续补充详细硬件复刻
科技与狠活17:基于Odrive解决方案,进行FOC磁场定向控制算法测试,理论与效果差异很大,不过为后续机器人力反馈夹爪提供一些支撑,但还有一些问题需要搞明白。
科技与狠活4: Dummy核心板,驱动板手搓后,系统调试问题说明,避坑指南,最新硬件优化
科技与狠活5:Dummy真小白组装避坑说明,电机径向磁铁,减速器,相位接线,问题一个不能少,小白必踩坑
科技与狠活2:避坑,复制dummy没那么简单吧,35步进电机FOC控制,问题说明1
up静悄悄!不是在摸鱼就是在开源!咕咕机开源噜【星火计划】
3年前,STM32 H7B0手搓焊接,双SPI ROM扩展,调试LVGL, 做出这种效果,还行吧,要开源
DUMMY复刻调试,这种问题,着实难。好在有好的结果
机器人组装第一阶段效果,后续还是得详细讲解下具体技术细节
第1讲:DUMMY系统芯片选型之FLASH持久存储以及调试与控制问题分析
科技与狠活19:忍不住快速讲讲三相MOS FOC磁场定向控制算法疑难点,讲着都难,还是分享下我推公式的总结吧,实在没法从头说,有问题评论区见吧
科技与狠活14:加完钢板,Dummy运动效果还行,实锤稚晖君DH参数是没问题的,时间允许给大家讲讲DH参数,真核心
机器人复刻,组装,电机调试,别炸了,不然不好交代,齐步走
科技与狠活8:Dummy驱动强劲效果再呈现,必要问题再说明,让你少走弯路,硬件部分最后一讲,下次就是深度应用了吧
启动电容和运行电容区别
作为一名电子发烧友的电子垃圾
项目启动了,能完成么,不确定吧,走着走着有些着就有路了吧
科技与狠活系列9:自制ARM最强板卡STM32 H743IIT6,集高级功能于一体,让SDRAM实现32M内存扩展,效果很棒
科技与狠活7:Dummy核心硬件终于可以自我迭代进化了,着实不易,算是里程碑吧,记录下
钢网,小焊台,听锡融化的声音,42电机驱动FOC控制板
自制电动车增程器后续
科技与狠活22: 切入电流环,Clark 变换,Park变换,低通滤波器,深入讲解下FOC学习的笔记,做一次专业技术总结,可能比较难以理解,但是的确很重要
机械臂动起来了,有点效果,不是想要的,后面自动轨迹跟踪才是,反正动起来了
第5讲:如何基于串口进行Dummy机械臂调试(关键)
科技与狠活3: 手工活,带你走进详细的手搓贴片,虽然曲折,好歹dummy机械臂驱动,控制均正常
稚晖君Dummy复刻换上钢板,机械臂终于有了她该有的样子,前前后后一顿折腾,有了更多扩展的可能
88元的一体热风枪还太贵?咱来个58元的WY858热风枪套件,省钱的同时还能享受动手的乐趣,它不香吗?
简单的复位,机器人复位,就这么简单
0028 从发射极输出的开关电路 自学计算机到极致:手搓电脑之从欧姆定律到微型计算机
人体检测器制作
科技与狠活21:FOC控制算法实现两个旋钮同步孪生控制效果,跟随运动效果,基于电流环实现,记录下调优经验
杰理AD14系列开发(开源):SP03画PCB电路板(嘉立创EDA)
DIY 投影仪手电筒
科技与狠活20:机械手矢量控制算法FOC之PID速度环惯性模式演示,之后关于FOC实验先告一段落了,回顾职场过往经历,聊聊未来计划,开始下一阶段挑战
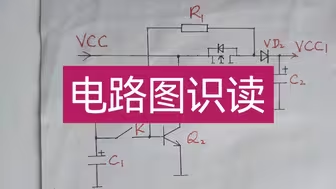
怎样看懂电路图!!!
科技与狠活12: H7 LVGL屏幕IIC触摸功能验证完毕,整个STM32全系列玩了一遍了,下一阶段准备做支持linux内核的板子了
科技与狠活1:有点坑,还是说明一下,dummy复刻没那么简单,42电机驱动说明下潜在问题