V
主页
老铁们,一起来围观,重温下腾讯成员!! 来自Robotics X 实验室的机器人Ollie~ (21年6月发)
发布人
https://v.kuaishou.com/YNqEDh
打开封面
下载高清视频
观看高清视频
视频下载器
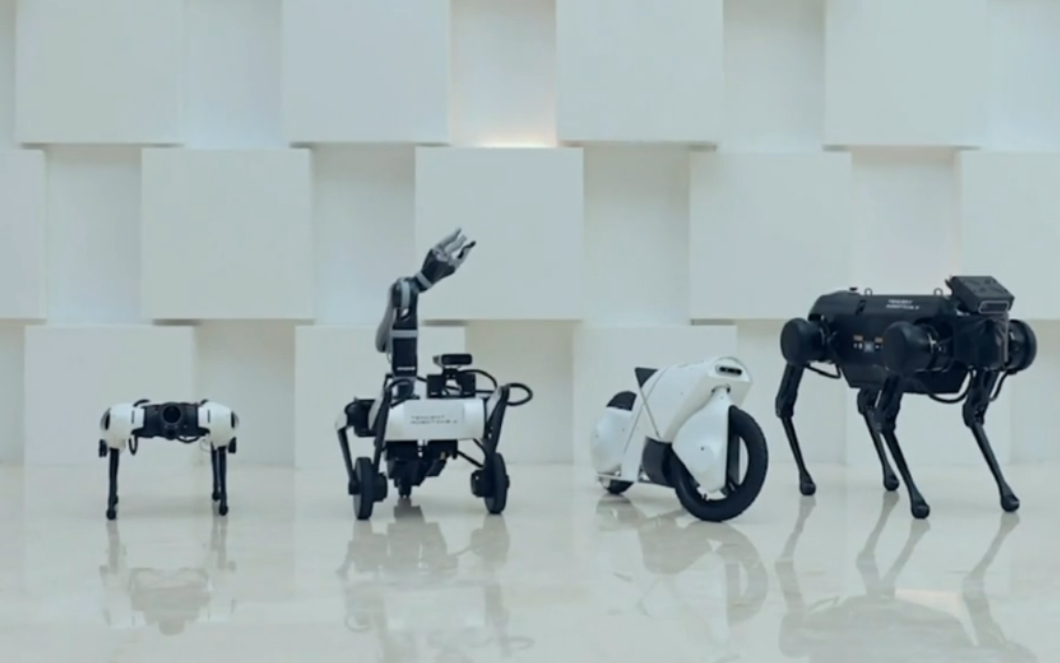
腾讯Robotics X实验室公布了「灵巧操作机器人」研究进展,目的很明确——致力于服务大众生活。
今天给铁子们介绍一位腾讯新成员,机器狗Max!软硬件都是腾讯Robotics X实验室自研,这可是一只有腿又有轮,还会翻跟头的狗。 (21年3月)
腾讯Robotics X实验室的机器人小五(The Five),这作为原型机在养老院实验场景做的一次任务展示,希望未来能在人居生活中发挥作用,欢迎大家来围观。
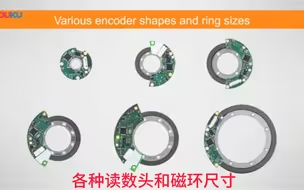
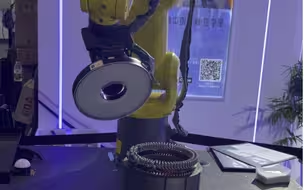
大中空国产磁编,替代雷尼绍aksim-2,可做z增量,绝对式(biss-c,ssi)等多种通讯方式,可应用于医疗、国防、航空航天、工业、机器人系统中。
机器人关节运动和可视化
Aksim-2雷尼绍编码器,多用于机器人关节,最大20bit分辨率
TQ-RoboDrive |世界最先进的drive
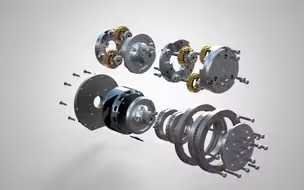
来看看行星减速电机,机器人关节模组内部是怎么运行的吧
Kollmorgen,如何为您的协作机器人选择无框架电机-两分钟运动
人型机器人关节,自带驱动CAN
从零开始构建一个6轴机器人手臂
今天给大家介绍无框电机,他们具备哪些特点呢,是因为这些特点它才适合用于各种机械臂,四足机器人,双足机器人,手术机器人关节等
国产大电流140A直流伺服驱动器,人形机器人,四足机器人,特种设备等
编码器可分为光电编码器、磁性编码器、电感式编码器和电容式编码器。他们的性能如何比较,根据网络和自身看法做了几个雷达图,希望可以帮到大家,有很多自身的看法。
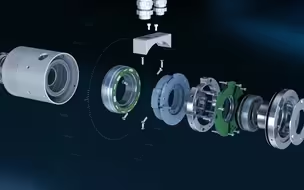
TQ无框电机安装视频,多用于手术机器人等机器人关节。
机器人关节模组介绍
LAD机械臂-制作- 3D打印- 5个伺服DIY
现在人形机器人这么火,我相信我们会助力人形机器人的发展,国产大电流直流驱动器1-80A,各种转台设备和各种机器人,精密设备等。
宇树四足机器人,深度体验,好想拥有一台。
如何制作步行类人机构机器人| DIY项目|创意科学
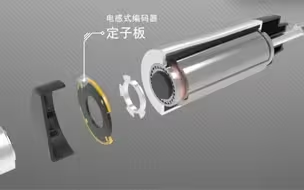
人形机器线性关节--电感编码器
一款中空磁编介绍
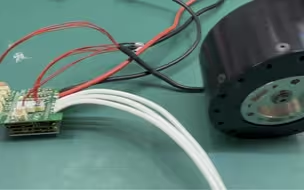
减速电机模组,机器人关节,正反转调速测试。
傅利叶康复机器人
华为投资8.7亿成立东莞极目机器人,华为要真正加入机器人领域了吗?
爬壁机器人,这个蜘蛛侠机器人可以利用电磁脚爬上墙壁和附着在天花板上(翻译)
微型直流伺服驱动器,国产方案,适用于各种特种集成度高的设备和机器人。
双足机器人SUBO-2姿态稳定实验
外观检测,协作机器人
Elmo驱动器轻松适用机器人关节电机。
绝对编码器工作原理
国产也可以这么好,介绍三种光学编码器,绝对式和增量式。
机器人关节,电机模组1.5米水深测试。
达闼 人形机器人
机器人关节,重复定位精度测试,350mm臂长测试出重复精度小于0.02mm,转换成角度重复精度小于0.004度
RLS磁性编码器最适合TQ-RoboDrive电机(案例研究、翻译、我看完收获很多分享给大家)
手动做了一个不均衡负载测试,大电流直流驱动器,对标国外品牌,可用于各种高性能机器人,例如仿人,四足,巡检,高稳定性和高温度并存
有没有大神看看我们做的谐波电机,机器人关节模组
对机械手感兴趣的可以交流#埃斯顿人形机器人
雷尼绍atom光栅系统编码器安装视频,微型光栅系统