V
主页
图像平移和旋转操作--LabVIEW Vision
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
通过ROI提取图像函数--LabVIEW Vision
低层函数实现event图像采集方式-LabVIEW Vision
图像管理与显示-内存中的图像(LabVIEW Vision)
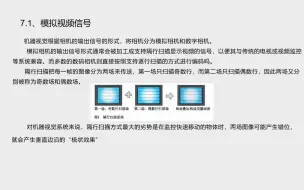
机器视觉(machine vision)--图像采集
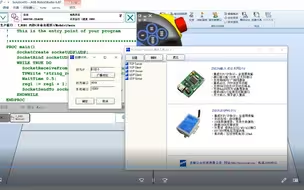
机器人通信补充--Socket通信使用UDP协议
图像属性操作(图像管理与显示)-LabVIEW Vision
通过PC程序写入机器人数据--基于PC SDK
PC程序与机器人系统连接--基于PC SDK
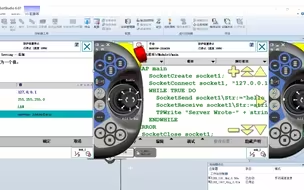
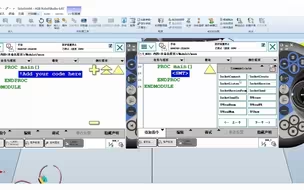
机器人套接字(Socket)通信(2)--Server端的建立
通过"求和平均"方法消除图像噪声--LabVIEW Vision
图像及坐标轴的校准--LabVIEW Vision
多幅图像写入AVI文件--LabVIEW Vision
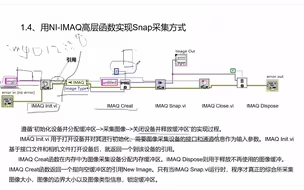
基于Labview vision图像分析处理---高低层函数实现Snap功能
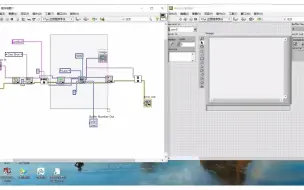
基于Labview vision的图像处理与分析
图像分离位平面图--LabVIEW Vision
自带图像文件读写函数--LabVIEW Vision
机器视觉(machine vision)--镜头(1)
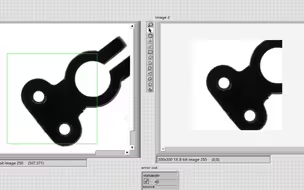
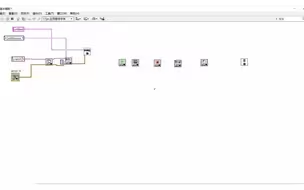
IMAQ Image ToImage 2程序讲解-LabVIEW Vision
课程(机器视觉vision)
机器视觉(vision)--成像系统
结构相似度比较-LabView Vision
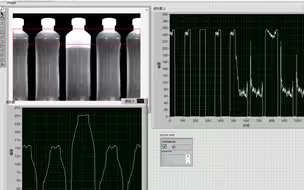
灰度分析(线灰度均值&ROI边界灰度曲线)--LabVIEW Vision
机器视觉(machine vision)-相机(2)
机器视觉(machine vision)--镜头(2)
机器人实操与编程(12)--下料机械手程序讲解
Snap图像采集实现方式(下)-使用Labview Vision 低层函数
先“抓”后“拍”的实现--修正TCP坐标方法
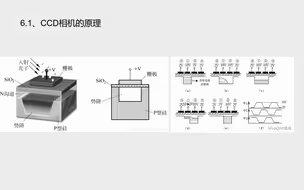
机器视觉(machine vision)-相机(1)
高层函数实现Sequence-Labview Vision
“飞拍”的实现--机器人视觉程序编写
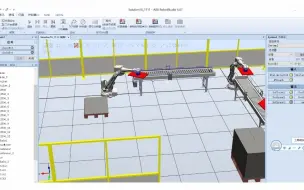
一步一步玩转机器人虚拟仿真(2)
机器人实操与编程(6)--IO设定及初始化程序编写
机器人套接字(Socket)通信 (3) --一次发送400个num型数据
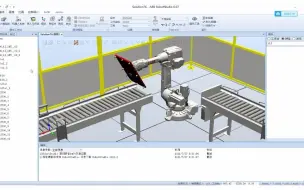
实战:搭建机器人搬运仿真工作站(上)
机器视觉(machine vision)-如何筛选相机
像素指针VI的介绍-LabVIEW Vision
外部窗口显示(1)--LabVIEW Vision
机器人实操与编程(8)--仿真信号连接及初步编程
明场校正函数的使用--LabVIEW Vision
简易外部事件捕捉器--LabVIEW Vision