V
主页
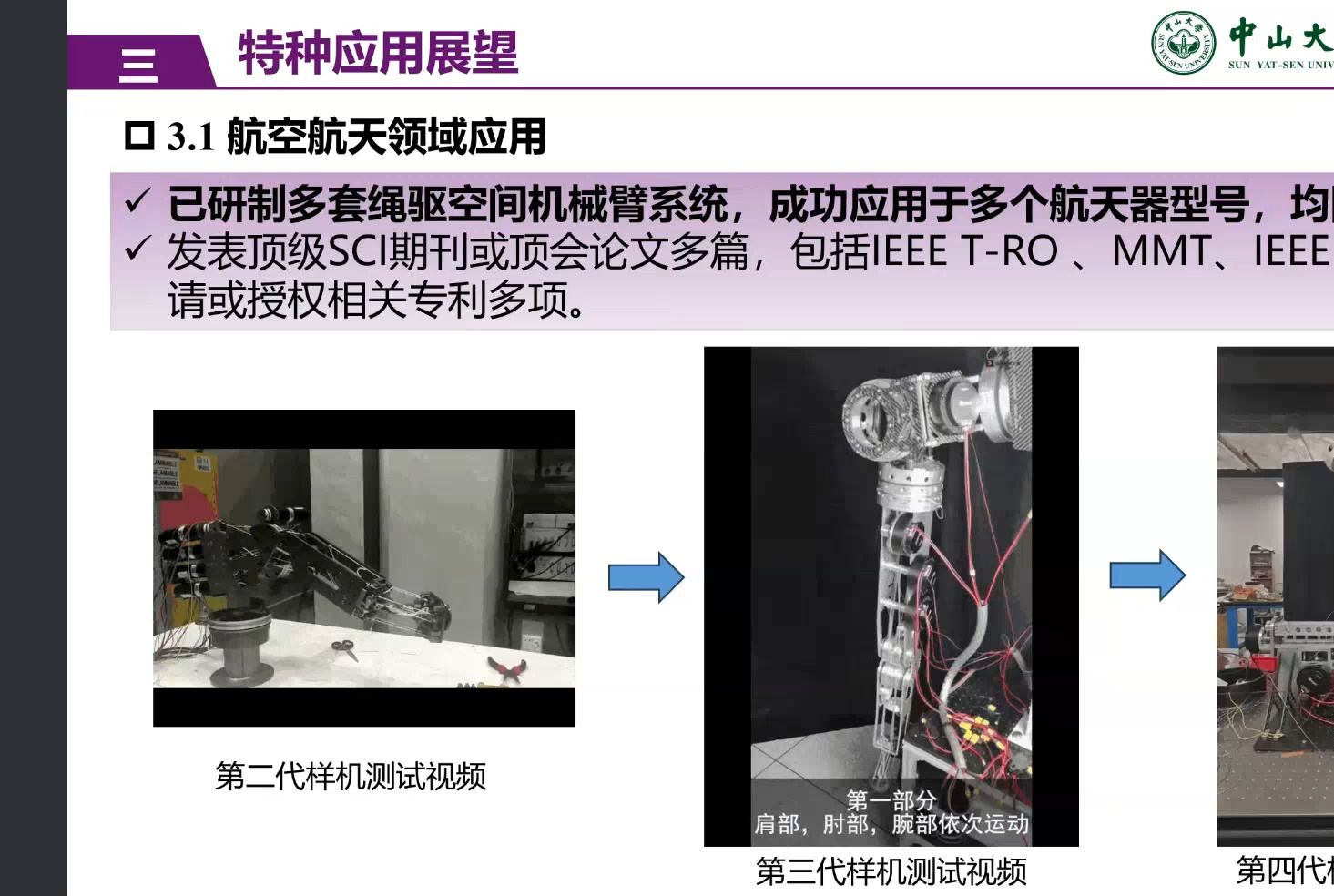
刚柔耦合绳驱机器人关键技术研究_20241103
发布人
【主题】刚柔耦合绳驱机器人关键技术研究 【时间】2024年11月3日21:00
打开封面
下载高清视频
观看高清视频
视频下载器
提问:走好做研究的第一步_20240625
从错综复杂的私交关系看“吴门派诗书画三绝”_20241110
文学中的精神疾病研究_20240626
基于复杂网络和深度学习的脑电信号研究_20240619
2030年:当最强AI和最强机器人结合,会发生什么?
古代赋役研究
复杂网络上的演化博弈_20240928
2024年智能视觉产业大会
电磁电报与象征主义_20240104
技术与社会的“无缝之网”:以中文打字机的发明史为例_20231202
戏剧作为人类学方法_20240508
【B站强推!】2024最全最细自学Python全套课程!允许白嫖,拿走不谢!全程干货无废话!逼自己一个月学完,从0基础Python小白到编程大佬只要这套就够了!
形式的意义,意义的形式_20240510
把游戏作为方法:透过电子游戏看世界_20241111
时空视域的中国乡土社会认知——《乡土中国》导读_20240201
艾朗诺和他的苏轼研究_20240908
第一届机器人人文学术研讨会(下午)_20231203
汉语写作教学与研究_20240316
《环太平洋,我打造出最强机甲》1-178,林风穿越到《环太平洋》世界,拥有了超级学习能力,开局就造了一台20米的大型机甲,和巨型机甲合作,杀死了一头80米的怪兽
近十年中华文化海外传播研究:回顾、反思与展望_20241027
中国文化典籍英译史研究与写作_20240516
中国古代彩塑的造像学研究(力士篇)_20231128
机器能有人格吗:来自中世纪哲学的启示_20230614
从魔法到显微镜:早期现代科学与医学中的征象学说_20220710
AI 大模型周报 2024年11月 a
巫术何以理性化:卜筮的“媒介学考古”与华夏传播的新进展_20240222
译有所为_20240318
【中英】黄仁勋对话孙正义:共同探讨 AI 和加速计算的可能性|AI Summit 24
中古的诗意:魏晋南北朝诗歌漫谈_20230806
电子科技大学LIMITI战队RC干货分享——RC24视觉方案
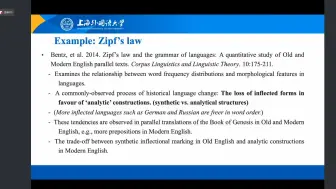
计量语言学视角的语言研究_202411006
【2024年11月国内最新】ChatGPT4.0免费使用教程,打工人和学生党的最爱黑科技!
对AI手机的思考和探索_20240429
【每日一题】23年全国卷真题 | 认识论 菌草科学研究和技术创新 | 必修四 哲学与文化
世变与身体:作为一种思想方式的唐传奇_20240606
兔子:关于机器狗,首先,我三年前警告过你们
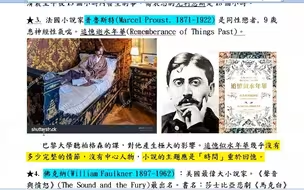
二十世纪欧洲小说的多重面貌—叛逆、魅丽、迷茫、疏离、悲剧性_20231022
大学之道:理解现代大学的三个维度_20240524
王海潮:数字人类学与中国数字社会研究_20221028
从日本京学派再议儒学日本化进程_20240630