V
主页
如何理解机器人的信号通讯
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
这8个机器人常用指令你用过几个?
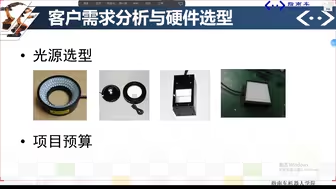
【工业机器人】利用工业相机与VISIONPRO软件实现测量任务[视觉]
机器人码垛程序怎么写?
工业机器人真的有那么复杂吗?详解给你看
自动化/机器人工程师能赚多少?
FANUC码垛
【工业机器人】机器视觉应用软件之图像获取
工业机器人如何进行I/O板卡配置?
安川机器人常见故障的解决方式
安川工业机器人操作与基础编程-2
西门子S7-1200与机器人profinet通信(上)
plc通讯及运动控制-1
KUKA机器人基础操作与编程-1
安川工业机器人操作与基础编程-3
ABB机器人控制柜
工业机器人本体长的是啥样的?拆解给你看
KUKA基础编程:信号指令的使用
拆解机器人本体
认识安川机器人
揭秘工业机器人“四大家族”
【工业机器人】机器视觉应用软件技术简介
visionpro视觉工具的讲解和使用(上)
工业机器人由哪些组成
FANUC机器人基础操作与编程-3
想学电气设计,都需要会哪些?
机器人绝对轴关节 运动指令
西门子S7-1200之间的profinet、profibus-DP,以太网通信(上)
工业机器人示教器如何使用
FANUC机器人基础操作与编程-2
工业机器人国内发展势态
KUKA机器人基础操作与编程-2
KUKA基础编程:运动指令讲解
自动化系统集成方案与销售
工业相机和数码相机的区别在哪里?
学习机器人,你必须搞懂这四个坐标系!
机器人常见编程方法有哪些?
KUKA基础编程—控制柜认识
西门子S7-1200常用通信介绍
MVP视觉软件实用教程五:物品尺寸测量及结果输出
plc通讯及运动控制-2