V
主页
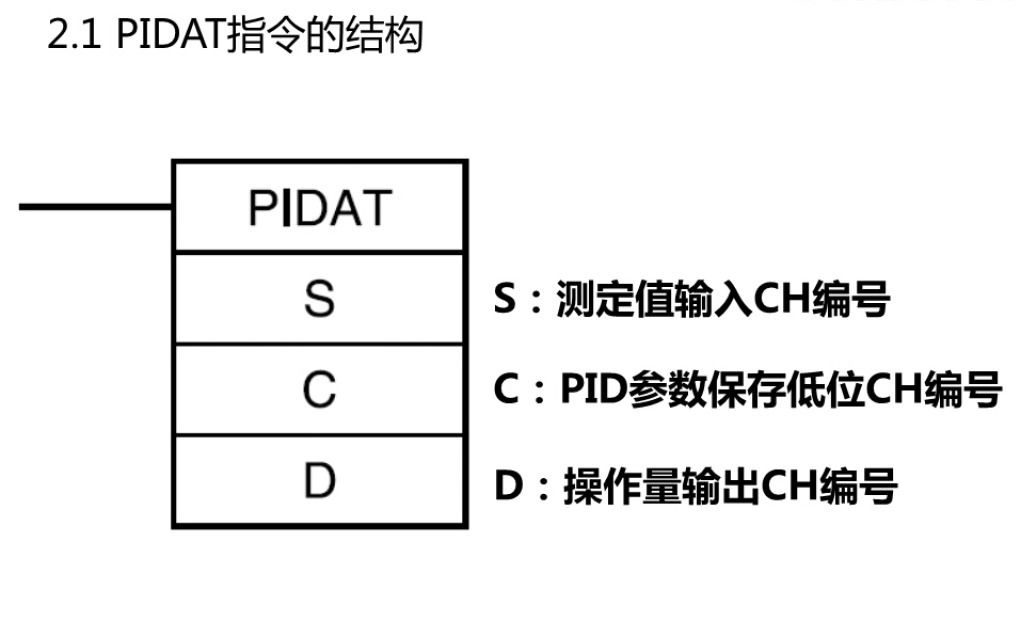
CP1 PLC怎样实现PID自整定
发布人
转自欧姆龙自动化工业官网的e-Learning学习,https://www.fa.omron.com.cn/elearning/video/1152?from=bilibili 用CP1 PLC做PID控制,自调整P、I、D参数可以用PIDAT指令
打开封面
下载高清视频
观看高清视频
视频下载器
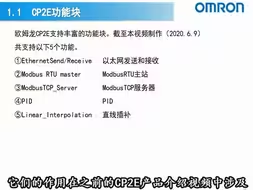
CP2E PLC模拟量控制入门
CP1H Modbus简易主站格式大揭秘(下)
CP1H怎样用FBL实现位置控制
欧姆龙CP1 PLC无协议通讯中TXD指令使用&排故
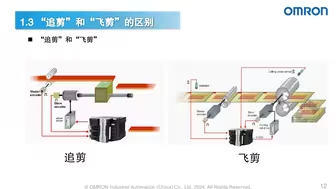
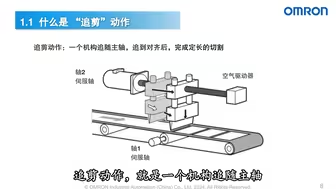
“追剪”与“飞剪”的区别
CP1H、CP1L与CPM产品特点比较
CP1H PLC如何使用高速计数功能
CP1H Modbus简易主站格式大揭秘(上)
CP1H使用ETN模块的以太网通信
欧姆龙CJ系列PLC建立I/O表的2种方法
NX/NJ PLC基本逻辑编程
AD/DA模拟量单元性能指标和使用设置
轻松学会E5□C温控器PID AT自整定
增量型编码器与CP1H PLC的接线
NX PLC模块接线
CJ1W-NC□□3运动控制单元直接操作
运动控制入门篇(下)
CP1H/1L模拟量、脉冲、通信等内置功能介绍及演示
使用CX-P软件对CPU工作参数和IO表参数设置
解读浮点数及相关PLC指令
用NX102实现包装机中的追剪动作
CP2E-ECM运动控制新功能块演示(预计8月31日可下载)
CP1H添加TS温度模块PID程序样例
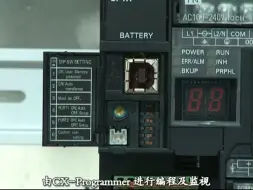
CX-P编程软件操作界面如何使用
NX安全PLC软件操作举例
CP2E如何升级功能块
安全PLC与普通PLC的区别
CX-P功能块FB使用基础
什么是PLC的功能块
解读程序中常见符号(#、&、@、%)的意义
NX1P2如何快速排故
NJ/NX运动控制概述
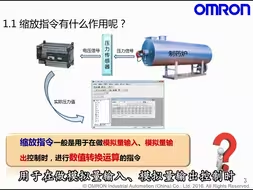
PLC定标/缩放SCL、SCL2与SCL3指令的使用与区别
如何通过以太网连接CP1L-E
案例36:PLC控制机械手自动搬运工件➕HMI仿真动画演示
CX-P自带FBL介绍
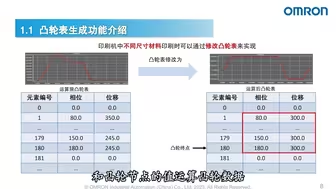
一键修改PLC凸轮表
CP1硬件构成及其作用
NX1P PLC与变频器便捷的通信方法
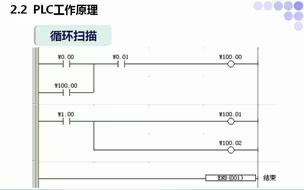
梯形图编程基本规则及常用指令