V
主页
京东 11.11 红包
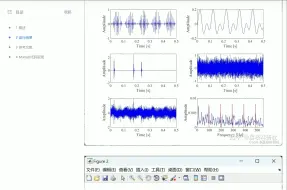
使用卡尔曼融合GPS数据和加速度数据,一方面提升定位输出速率,一方面可以再GPS信号不好时通过IMU惯导辅助纠正路线,加速度数据已经转为惯导坐标系下,并做了滤波
发布人
使用卡尔曼融合GPS数据和加速度数据,一方面提升定位输出速率,一方面可以再GPS信号不好时通过IMU惯导辅助纠正路线,加速度数据已经转为惯导坐标系下,并做了滤波矫正处理(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
【GPS+INS在MAV导航上的融合】基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真(IMU与GPS数据由仿真生成)(Matlab代码实现)
GPS定位模型动画演示(Matlab代码实现)
【通过粒子滤波进行地形辅助导航】用于地形辅助导航的粒子滤波器和 PCRB研究(Matlab代码实现)
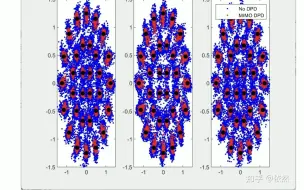
用于非线性多载波卫星信道的多输入多输出符号速率信号数字预失真器DPD(Matlab代码实现)
心动的信号第七季!大概率一对都成不了
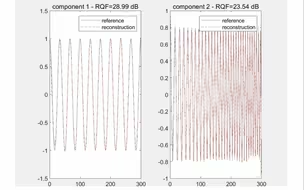
滑动奇异频谱分析:数据驱动的非平稳信号分解工具(Matlab代码实现)
具有梯度流的一类系统的扩散图卡尔曼滤波(Matlab代码实现)
陪看加更预告 土豆被大家调侃啦!慢点~怎么说话有青雅感觉~心动的信号7
融合版投稿 究极植物:光三线机枪香蒲
MATLAB|时序数据中的稀疏辅助信号去噪和模式识别
多传感器时频信号处理:多通道非平稳数据的分析工具(Matlab代码实现)
【状态估计】基于数据模型融合的电动车辆动力电池组状态估计研究(Matlab代码实现)
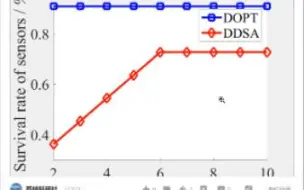
【无人机】用于无线充电传感器网络可持续充电的总线网络辅助无人机调度(Matlab代码实现)
【捕烙vs纯烙】偶遇FJ星尘由于过于激动导致渣操频出 最后被最强烙印爆杀
最新消息!伊朗曝标定最新打击目标了!以色列全面大战!信号出现了!
第6期下高雅CP cut 土豆和青雅互动越来越有趣啦!心动的信号7
心动的信号7陪看高雅CP女生陪看高雅once date约会cut青雅说了当时的烟花放不了所以又到海边放了一次 女生瑞评“沾光了”
来自宇宙深处的信号「无片尾」睡前故事
弱究极植物?究极忧郁菇忧郁的原因找到了!那就是他居然是弱究极植物
接下来怎么走?信号已经很明确了
【游戏王】纯幻奏十月表打雷火沸石的对策
打工人挑战期货1w赚到100w,第58天,趋势反转,利润回撤,不过常事
【故障诊断】用于轴承故障诊断的性能增强时变形态滤波方法及用于轴承断层特征提取的增强数学形态算子研究(Matlab代码实现)
打工人挑战期货1w赚到100w,第57天
最新消息!叙利亚首都遭以军“空袭”!以色列“闯大祸”!中國罕见“撂重话”!纳坦雅胡向美释全面大战信号!
融合版笑传之PPT
【可再生能源场景生成】使用生成对抗性网络的数据驱动场景生成方法研究(该方法基于两个互连的深度神经网络与基于概率模型的现有方法相比)(Python代码实现)
理想ONE信号弱车门无法打开
地铁站里面有广播信号吗?从地下坐电梯一路上到地面感受信号接收。
财政部信号清晰 态度积极,不再回避提高限额等呼声 张瑜/屈宏斌/戴康
当角色融合在一起…21
原创捷德奥特曼新形态 风月奇迹之光
融合植物88:大蒜家族!
【信号处理】天线分集与空时编码技术——Alamouti空时块码(matlab代码实现)
【信号处理】SAR 信号处理(Matlab代码实现)
信号超强,不服来战,锐捷天蝎路由器龙勃版
心动的信号7花絮青雅的全都在宿舍
心动的信号7加更版 高雅CP cut 真的好甜啊!宠
【负荷预测】长短期负荷预测(Matlab代码实现)
新手上路:两大减速信号