V
主页
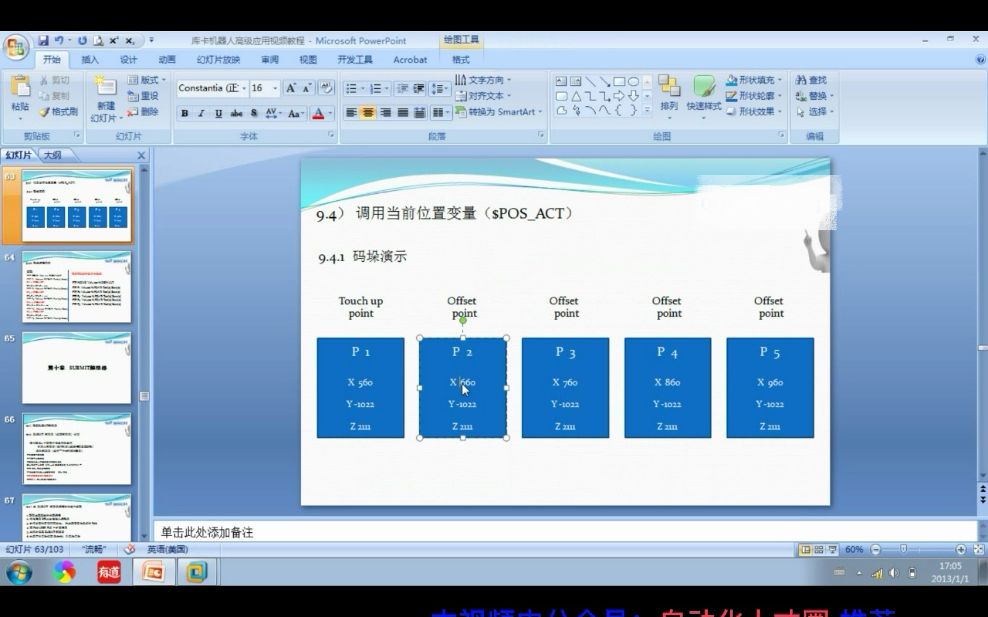
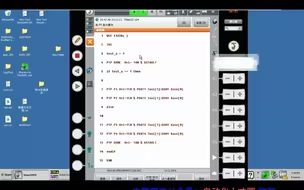
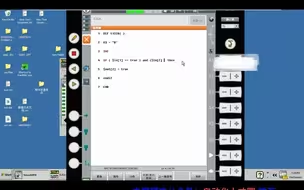
第20讲 KUKA机器人调用当前位置变量
发布人
库卡高级应用视频教程
打开封面
下载高清视频
观看高清视频
视频下载器
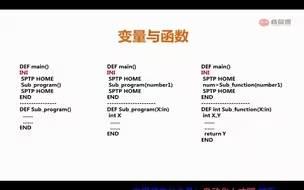
第02讲 KUKA机器人变量
第16讲 KUKA机器人switch case 分支编程
KUKA机器人高级编程(上)2-1 变量复习C
第27讲 KUKA机器人配置自动模式
第26讲 KUKA机器人中断编程
第13讲 KUKA机器人询问或if分支
10_11KUKA机器人主程序对子程序的调用
第28讲 KUKA机器人配置外部自动模式
第17讲 KUKA机器人字符的使用
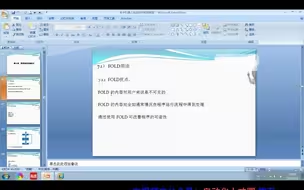
第11讲 KUKA机器人fold用法
04-6KUKA机器人机器人的手动运行-1
KUKA机器人高级编程(上)2-2 数组arrayC
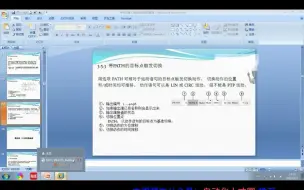
第08讲 KUKA机器人带PATH的目标点触发切换
第04讲 KUKA机器人计算机预进
04-4KUKA机器人示教器的基本操作-1
KUKA机器人高级编程(下)5-9 resume指令
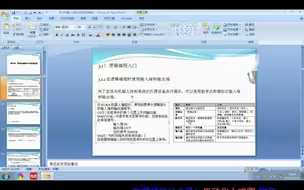
第03讲 KUKA机器人逻辑编程入门
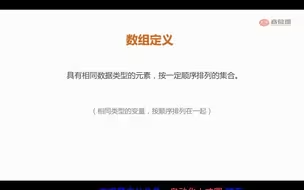
第24讲 KUKA机器人数组
10_10KUKA机器人程序结构化设计
20 发那科机器人的参考点的使用和标定
KUKA机器人高级编程(上)2-4 枚举enumerationC
32 发那科机器人位置寄存器的使用
04-5KUKA机器人示教器的基本操作-2
KUKA机器人程序文件的使用
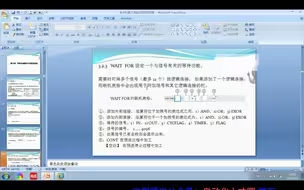
KUKA机器人高级编程(下)3-2 triggerC
第09讲 KUKA机器人简单的函数切换
09_3KUKA机器人设定机器人BASE坐标偏移1
11_1KUKA机器人局部子程序和全局子程序的使用
KUKA机器人高级编程(上)5-3 提示信息举例C
KUKA机器人高级编程(上)5-7 编辑对话框程序C
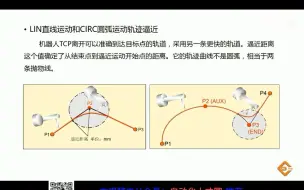
12_3KUKA机器人沿轨迹运动的姿态导引
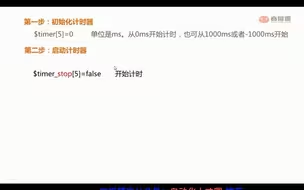
KUKA机器人高级编程(下)1-2 计时器的使用C
13 发那科工业机器人码垛的示教
第18讲 KUKA机器人用计时器测量节拍
KUKA机器人高级编程(下)5-10 中断子程序中的限制C
51 发那科机器人查看机器人当前坐标
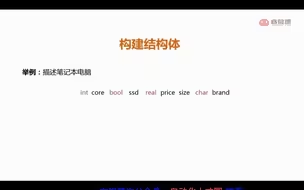
KUKA机器人高级编程(上)2-3 结构体structureC
KUKA机器人高级编程(上)1-1 主要内容介绍C
16 发那科机器人用户坐标系的使用 四点法标定a
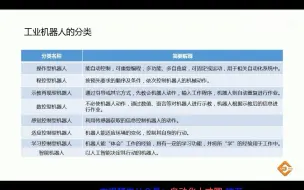
01-1KUKA机器人的分类及功能-1