V
主页
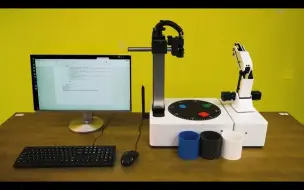
创非凡QC-9KT实用场景2(分拣系统)
发布人
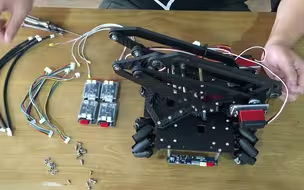
QC-9KT是根据机器视觉主流应用而设计的多场景实验平台,可进行定位、测量、识别与检测等多种视觉功能的实验开展,配合平台中的转盘与机械臂则可模拟多种具体应用场景,让实验内容变的立体丰富,学生们通过对本平台的学习和使用,了解智能化工业生产升级方向、掌握机器视觉应用技术、掌握机械臂控制技术,从而满足相关专业的知识与技能要求。 该视频主要展示其应用场景之分拣系统。
打开封面
下载高清视频
观看高清视频
视频下载器
创非凡QC-9KT实用场景3(颜色形状分拣系统)
创非凡QC-9KT实用场景(垃圾分类)
创非凡QC-9KT实用场景1(自动加工系统)
创非凡QC-8KT机械爪装配③
创非凡QC-9KT产品介绍
课程五:物料分拣传送带控制参数调试
创非凡QC-8KTGXII 底盘循迹模块布线
创非凡QC-8KT-舵机模组与机械臂装配②
创非凡QC-8KT 锂电池充电说明
STEP 4:机器人演绎皮影文化
创非凡QC-8KT 电压报警模块使用说明
创非凡QC-8KTGXII 底盘电机布线
足球机器人比赛实况
足球机器人比赛强队分享1
智能制造—物料激光雕刻搬运码垛场景
创非凡QC-8KT机械手舵机模组装配①
智能制造—MES加工场景
课程七:轴/套的检测、分拣与装配
足球机器人第三轮培训~远程软硬件联调
创非凡8KTGXII 舵机与驱动接线
足球机器人比赛强队分享2
创非凡8KTGXII 模块及功能介绍
STEP 2:皮影戏机器人—机械爪装配
足球机器人软件培训(修改lua脚本)
创非凡8KTGXII 舵机模块安装及布线
智能制造—PCB涂胶装配场景
创非凡QC-8KTGXII 电机模组与麦轮装配
创非凡QC-8KTGXII 底盘承载平台装配-
创非凡8KTGXII二级连杆臂装配
足球机器人软件培训(添加dll并演示仿真)
创非凡8KTGXII 电机与驱动接线
足球机器人比赛强队分享3
创非凡8KTGXII扫码及颜色传感器接线
STEP 1:皮影戏机器人—机械臂装配
足球机器人比赛失败案例及解决方案
韩国网友欢观看我国在人工智能的应用,AI机器人,导盲狗,战斗机器狗,微小机器人!
iLoboke足球机器人比赛新手导学
课程八:图形化编程物料识别与分拣
STEP 3:皮影戏机器人—导轨滑台装配
iLoboke足球机器人“竞技软件+硬件”综合培训