V
主页
京东 11.11 红包
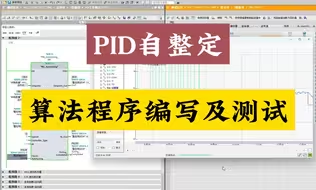
PID自整定 信号采集>滤波>PID>输出率限制>自整定
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
PID自整定算法-西门子PLC
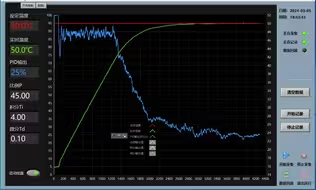
PID闭环控制算法 超高精度闭环控制 模拟量和滤波
PLC如何采集高速脉冲信号
模拟量应该怎么学,超高精度的pid闭环控制怎么做,模拟量滤波怎么做?批量信号处理怎么做
电机一键启停的程序怎么写 教你如何做自控项目
PLC手自动程序怎么写
PID算法超详细讲解,高精度闭环控制,西门子PLC,LabVIEW
PLC模拟量采集模块的技术参数
上料机械手抓取坐标的计算第二篇 scl语言的教程
Plc如何采集电位计信号
PLC柜如何进行出厂测试
三轴上料机械手怎么定位抓取坐标?scl语言教程
工控系统中模拟量信号的类型
工控系统,被翘单的客户又找回来了
两用一备项目的最后一个视频 教你如何做工控项目
善用FC/FB,让程序框架更合理
串口通信故障怎么快速排查
模拟量调试的必备工具-万用表与信号发生器
PLC逻辑程序从简单到复杂
博图中的-FCFB如何选择使用
Modbus RTU通信太慢了,提高速度的6个方法
ABB变频器ACS510的典型应用,图纸及参数设置
博图模拟量转换程序
以前写的PLC程序,自己都看不懂了
PLC如何进行模拟量转换
西门子1200PLC程序写满了怎么办,怎么硬件版本升级
博图scl语言的基础入门知识
说走就走的出差,故障维修
扩展模块算PLC吗
PLC的硬件I/O点损坏,如何修改程序
变频器的一次回路怎么设计 入行时挨了顿骂才学会的知识点
做工控的会上位机开发重要吗
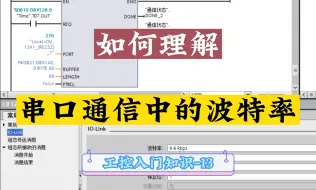
如何理解串口通信中的波特率
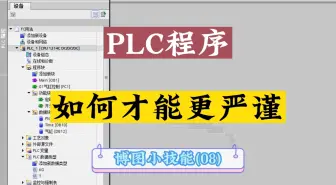
如何才能使plc程序更严谨
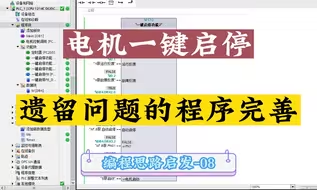
一键启停程序的功能优化,教你如何做工控项目
中间继电器是工控系统中的万金油
西门子PLC入门详解
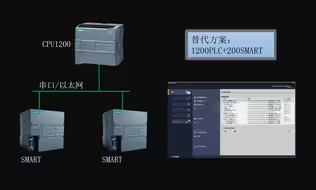
西门子PLC PROFINET I/O的实现1200PLC与200SMART的PROFINET通信
PLC中如何自定义DI点功能
工控资料分享 PLC