V
主页
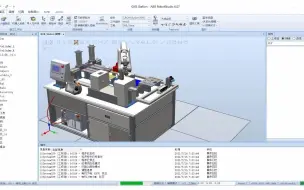
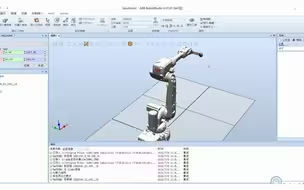
实战:搭建机器人搬运仿真工作站(中)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
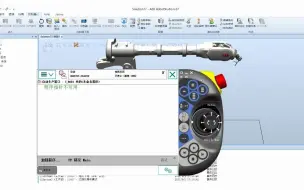
实战:搭建机器人搬运仿真工作站(下)
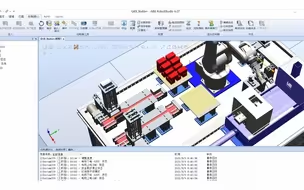
实战:利用ABB studio搭建机器人码垛仿真工作站(上)
实战:利用ABB Studio搭建压铸仿真工作站(下)
实战:利用ABB Studio搭建压铸仿真工作站(中)
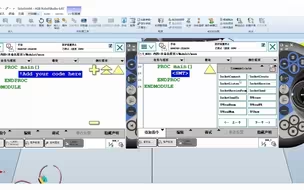
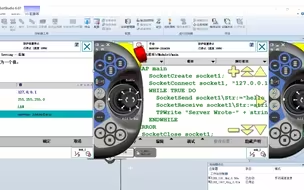
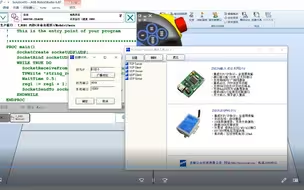
机器人套接字(Socket)通信(2)--Server端的建立
一步一步玩转机器人虚拟仿真(4)
机器人实操与编程(10)--码垛上料程序编写
机器人套接字(Socket)通信 (1) --创建Client端
一步一步玩转机器人虚拟仿真(3)
实战:利用ABB studio搭建机器人码垛仿真工作站(下)
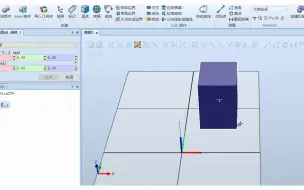
机器人实操与编程(3)--六点法建立TCP坐标
一步一步玩转机器人虚拟仿真
机器人实操与编程(9)--码垛项目编程
一步一步玩转机器人虚拟仿真(5)
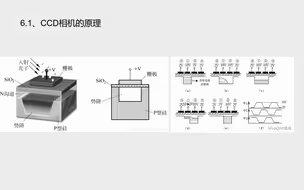
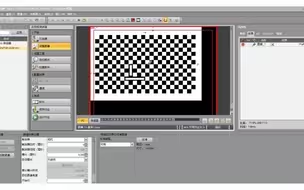
机器视觉(machine vision)-相机(1)
机器人实操与编程(6)--IO设定及初始化程序编写
机器人实操与编程(1)--手动操作
机器人套接字(Socket)通信 (3) --一次发送400个num型数据
机器人实操与编程(5)--基本编程控制指令
一步一步玩转机器人虚拟仿真(10)
实战:利用ABB studio建立拆垛虚拟仿真工作站
机器人实操与编程(8)--仿真信号连接及初步编程
一步一步玩转机器人虚拟仿真-ABB Robotstudio(11)
机器视觉(machine vision)--图像采集
机械人视觉抓取程序编写(3)--坐标数据字符串的解析
机器视觉(machine vision)--相机(3)
机器人实操与编程(7)--程序编写与调试
机器人实操与编程(2)--校准与创建Rapid程序
机器人通信补充--Socket通信使用UDP协议
机器视觉(machine vision)--镜头(2)
机器人套接字(Socket)通信(4)--客户端接收400个数据
机械人视觉抓取程序编写(2)--坐标数据的获取
Snap图像采集实现方式(上)-使用Labview Vision 高层函数
机械人视觉抓取程序编写(1)--与InSight通讯的建立
咱们工人有力量--机器人更有力量
机器人实操与编程(12)--下料机械手程序讲解
图像的像素操作--LabVIEW Vision
读写用户自定义数据 (图像管理与显示)-LabVIEW Vision
先“抓”后“拍”的实现--修正TCP坐标方法
机器人实操与编程(4)--IO及工作逻辑设定