V
主页
【无人机】UAVCAN:用于硬实时航空器网络的高可靠发布订阅协议 | 由Pavel Kirienko和Scott Dixon讲解 | PX4开发者峰会2019
发布人
https://video.ethz.ch/events/2019/px4_developer_summit/8069c7bf-df2f-4ec7-a8d3-8ea771a17b6d.html PX4开发者峰会2019@ETH苏黎世联邦理工大学 由UAVCAN作者Pavel Kirienko和Scott Dixon讲解,UAVCAN:用于硬实时航空器网络的高可靠发布订阅协议 欢迎贡献字幕 中文社区:http://shequ.dimianzhan.com
打开封面
下载高清视频
观看高清视频
视频下载器
【PX4开源无人机】UAVCAN | Pavel Kirienko | PX4线上开发者峰会2020
【无人机】像实飞一样测试:为libuavcan实现实机测试 | 由Scott Dixon讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【零基础无人机组装教学】Pixhawk4飞控+Tarot机架从组装到试飞视频
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【无人机】现代无人机系统的高能效电力推进 | 由Zubax的Alexander Sysoev和Pavel Kirienko主讲 | PX4开发者峰会2019
【无人机】硬错误调试HardFault Debugging | 由David Sidrane讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】PX4飞行任务架构 | 由Dennis Mannhart与Matthias Grob讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】Dshot MultiShot OneShot PWM是什么以及优缺点 | 电调通讯协议解读 - PART 1 | Joshua Bardwell
【PX4开源无人机】纯硬件仿真(SIH)低成本硬实时的HITL | Romain Chiappinelli | PX4线上开发者峰会2020
【无人机】PX4软件在环仿真(SITL)改进与ROS集成 | 由ROS平台经理Tully Foote讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】PX4在STEM教育的应用 | 这个团队结合树莓派做了很多有疯狂的项目 | 由俄国团队COEX演讲 | PX4开发者峰会
【无人机】PX4状态估计更新 | 由EKF2/3作者Paul Riseborough讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
【开源飞控】QGroundControl(QGC地面站)入门教学
【无人机】ROS2为PX4增添新动力 | 由Nuno Marques讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
Holybro Pixhawk4 S500 Kit 四旋翼无人机套机装机演示-01安装电机
【无人机】PX4视觉和Offboard控制接口 | 由Auterion计算机视觉工程师Martina Rivizzigno讲解 | PX4开发者峰会2019
【无人机】VTOL垂起无人机控制与空速错误检测 | 由Roman Bapst讲解 | PX4开发者峰会2019
【开源无人机】从零调试一架开源无人机
[视频教学] 快速实现 PX4 Offboard 模式飞行以及 Gazebo 仿真 | 无人机自动驾驶GAAS 01
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
【无人机】Dshot完全解读 | 电调协议解读 - PART TWO
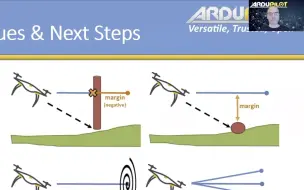
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
【C++】十小时从入门到精通100P | 2019年录制 | 飞控开发入门必会
【开源无人机】舵机控制教学
【RTOS实时操作系统】PX4-基于NuttX操控无人机飞行 | 由PX4底层系统维护者David Sidrane讲解 | 2019年NuttX国际工作坊
【开源无人机】Vins_fusion代码讲解
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
【机器人】开源机器人:上手 Gazebo 与 ROS 2
【开源飞控无人机】控制分配:重构PX4混控系统 | Julien Lecoeur & Silvan Fuhrer | PX4线上开发者峰会2020·直播录像
【无人机】PX4飞控的过去现在和未来 | 由PX4创始人Lorenz Meier博士讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
PX4 SITL与Microsoft Airsim终于解决兼容性问题 | 仿真飞行演示
【开源无人机】零基础首飞一架开源无人机
Auterion在线讲座公开课 - 使用SDK控制PX4驱动的无人机
【研讨会】PX4开源无人机介绍与入门 | SITL仿真与MAVSDK演示 | Arm Innovation Coffee
【无人机】使用NXP恩智浦参考硬件的合作设计机会 | 由NXP无人机团队Iain Galloway与Gerald Peklar讲解 | PX4开发者峰会2019
【开源无人船】从零组装一艘开源ROS无人船
【阿木实验室】状态估计公开课录像 2018-11-17【高清版】
中文讲解XFLR5 6.47固定翼机翼模拟分析工具教学【DimianZhan社区】
国外大佬的Pixhawk 4飞控开箱
PX4软件在环(SITL)仿真现已支持FlightGear