V
主页
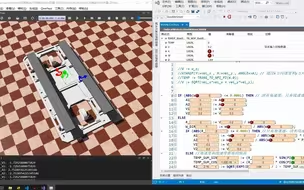
[ROS] 双轮差速机器人icar-多机编队-领航者算法-1
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
ROS双轮差速机器人Icar Navigation仿真
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
双轮差速与里程计导航算法运动控制仿真
《松灵ROS2开讲啦》第四期直播课:ROS 2代码实践
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
[新手可入门]基于pybullet强化学习机械臂抓取仿真
基于ROS的开源差速机器人Icar
RoboMonitor 机器人上位机 演示
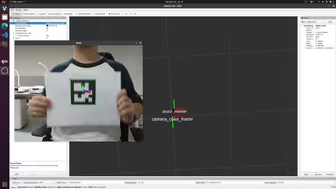
"ARUCO"ROS视觉定位算法测试
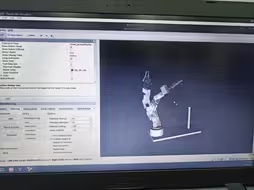
宇树K1机械臂的视觉抓取仿真
【考核用】调用opencv识别aruco码,在ros中更新tf
基于ESP8266的平衡机器人
基于ros路径规划+避障演示
乐视手柄ROS驱动及SLAM测试
《松灵ROS 2开讲啦》第六期 Nav2导航应用
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
【Blender(上集)大型机器人建模教程】
Unitree 2024 ROS暑期学校课程视频02-人形机器人H1开发分享
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
FrogMonster蛙蛙🐸的独家采访即将到来!
双舵轮AGV Webots与TwinCat联合仿真
双阿克曼小车基于简易线性MPC的曲线路径追踪仿真
四舵轮机器人 运动测试
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
从哈佛/MIT到浙江大学【ME41 浙大南科望组】
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
ros驱动真实ur5e机械臂
2025工创赛物流搬运机器人 赛事解读与问题分析2
1X发布了最新一代的人形机器人NEO Beta 家用型的人形机器人
做了一个时速超过一百每小时的扫地机器人
使用相机在ROS下的TensorRT量化推理yolo模型目标检测部署
【UE5】空间切割效果,转换关卡流,一键三连私信【切割】发工程~
1.9_现代CMake大型C++项目构建实战_C++ CMake Install 项目、库的导出与安装
1.10_现代CMake大型C++项目构建实战_C++ CMake 再次变大与库的调用(二)
人形双足模仿学习强化学习AMP ASE Exbody求助
嵌入式开发2024 09阶段:机器狗项目
三轮全向机器人 演示
走一走,摔一摔
【强化学习玩游戏】强化学习轮足机器人控制器,PPO算法原理+公式推导,月球登陆器训练+超级马里奥简单易懂的项目实战!