V
主页
京东 11.11 红包
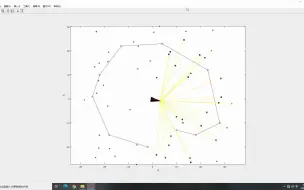
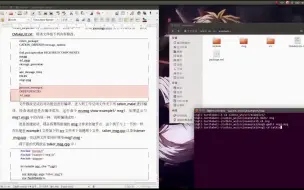
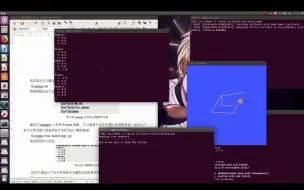
2.7PHD-slam仿真
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2.4粒子滤波算法1
(预览)2.7PHD-slam仿真
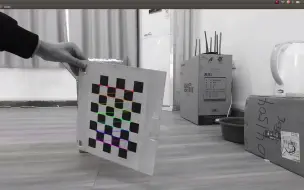
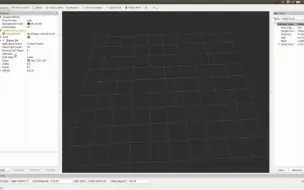
5.7 kinect2标定1
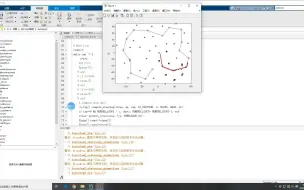
2.6fast-slam仿真
2.3拓展卡尔曼滤波算法
4.1 rviz介绍2
4.1 rviz介绍1
5.7 kinect2标定2
2.4粒子滤波算法2
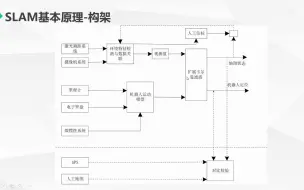
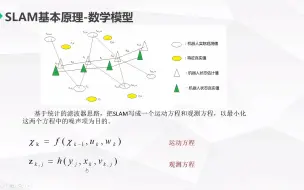
1.2slam模型2
5.7 kinect2标定3
(预览)2.6fast-slam仿真
5.7 kinect2标定4
2.5ekfslam仿真
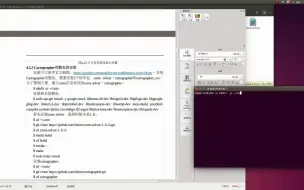
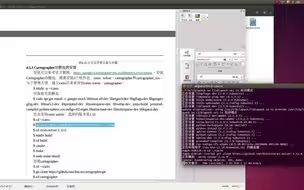
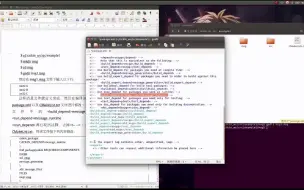
4.8 cartographer安装1
1.2slam模型1
4.1 rviz介绍3
4.2 gazebo介绍2
4.2 gazebo介绍1
(预览)1.1slam模型
4.5 gmapping建图
4.9 cartographer建图
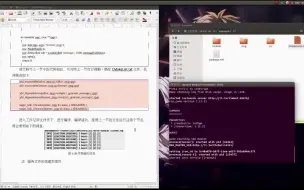
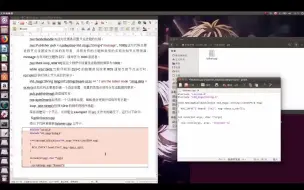
3.8 消息文件的创建及使用4
常熟理工学院 机械电子工程专业 R&A 机甲战队
3.8 消息文件的创建及使用3
3.5 ROS节点的使用
3.6 ROS主题与节点的交互2
3.6 ROS主题与节点的交互1
3.14 机器人跟随功能安装实现1
5.3 ORBslam2安装2
4.4 gmapping安装2
3.7 节点的创建和编译1
3.10 Launch启动文件
4.6 hectorslam安装
3.11turtlebot安装4
5.5 ORBslam2在ROS配置2
3.9 服务文件的创建及使用1
5.2 monoslam在线
4.8 cartographer安装2
3.8 消息文件的创建及使用1