V
主页
卢京潮自控课程补充答疑:超前校正的求解步骤=作图分析法-注解1和注解2
发布人
卢老师的作图分析法校正是一种非常经典的校正方式,每一步都有其特定的含义,这是注解1和注解2。
打开封面
下载高清视频
观看高清视频
视频下载器
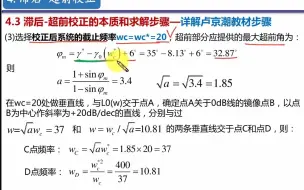
频域校正:滞后超前校正的求解步骤—作图分析法
【控制考研题库真题讲解】广东工业大学810控制,2021年真题第4题,根轨迹超前校正装置参数求解
自动化考研,根轨迹法超前校正,上海交通大学王显正教材例题解读!
离散系统的动态性能分析:绘制根轨迹!
电机驱动案例分析-直播回放
自控0基础课 |5min速成Bode图的绘制
基础4-8=理解相角条件=方法1 向量作图法【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
哈工大801控制真题讲解:频域校正题,2007年第5题
【控制考研】胡寿松自动控制原理第7版教材:第6章校正,重难点勾画,缺失期望特性法校正内容,推荐王划一 刘胜 裴润教材做补充学习
自控0基础课 | 8min速成稳定裕度
自动化考研,自动控制原理考试大纲解读,第4章根轨迹:先学会画,再学会性能分析,最后就是根轨迹法校正!
自控基础4-18=法则6 根轨迹与虚轴交点【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
自动控制原理,彻底搞清2种稳态误差,第2节:按输出端定义的误差求解:第1种类型!
自控基础3-5=二阶系统4种分类对应的时间响应性能分析-HB
自控基础3-0=考试大纲解读-第3章-时域分析【自动化考研,胡寿松自控】
EPLAN运动控制绘图速成专题课程
自控基础3-19=静态误差系数法的使用条件,带有前馈的ess为0时的Gc装置求解,【小鱼老师控制课堂】
自控基础4-14=分离点q2-试根法-长除法求解多项式【自动控制原理基础课】【根轨迹】
一类向量组线性相关性的快速判别方法,掌握后考研数学题变小学题【zzzyyx首创】
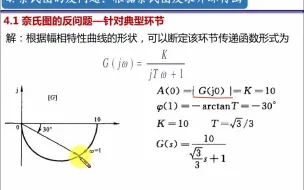
奈氏图的反问题考察:针对典型环节中的一阶惯性和二阶震荡!
【零基础学自控】机械系统建模3:分析机械系统时,是否需要考虑物块的重力?
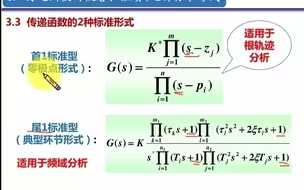
23自动化考研试听课:基础2-6=传递函数的2种标准形式:首一标准型和尾一标准型
自控0基础课 | 12min速成典型环节的Bode图
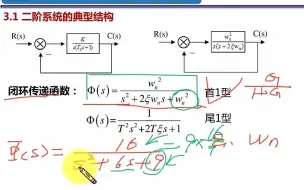
自动控制原理,二阶系统的典型结构和4种分类
基础4-19=法则7 起始角和终止角-向量作图法【自动控制原理基础课】【根轨迹】【小鱼老师控制课堂】
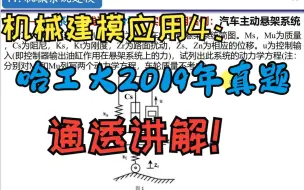
【零基础学自控】机械系统建模11=机械建模应用4=哈工大801控制2019年真题分析!
自动控制原理,截止频率,剪切频率,wc的快速求解方法!
自控基础4-13=分离点q1-定义及求解方程【自动控制原理基础课】【根轨迹】
自控基础3-7=高阶系统的单位阶跃响应和主导极点、偶极子的概念;胡寿松自动控制原理,主导极点
【控制考研】胡寿松自动控制原理第7版教材:第5章频域分析,重难点勾画,例题很经典,缺少三频段理论
【零基础学自控】机械系统建模6:多个元件串联或并联时,如何设辅助位移?哪里设?
19=卡西欧991cnx在控制考研中的应用:求解高阶系统根轨迹给定阻尼比下的K值,上交816控制2020年真题讲解
【零基础学自控】机械系统建模7:机械系统中,水平方向运动的分析
【零基础学自控】机械系统建模9:机械建模应用2=汽车悬挂系统的分析
卡西欧fx991cnx在控制考研中的应用14-利用函数方程模式求解分离点
24法考客观题李佳点睛冲刺考前聚焦押题
自控基础课3-3=一阶系统的时间响应及动态性能-HB,【自动化考研,胡寿松自动控制原理】
自控0基础课 | 9min速成频域响应!
自动化考研,现代控制理论,结构分解:按能观性分解!
自控基础课2-15=信号流图的绘制方法:注意2种情况的处理,自动化考研,胡寿松自动控制原理