V
主页
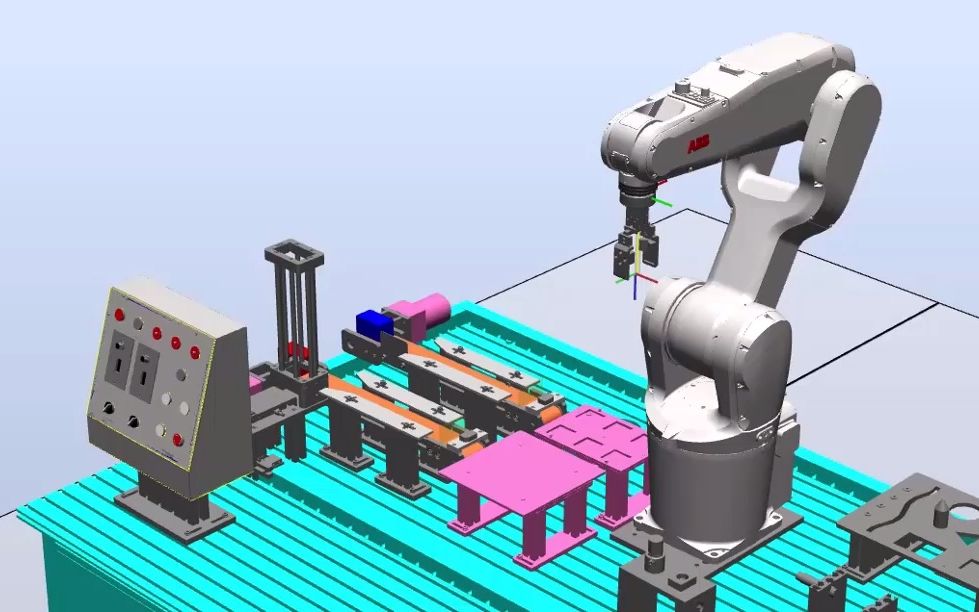
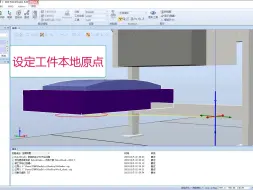
双垛码垛虚拟调试
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
涂胶在线调试实例
项目3最终效果视频
工业机器人离线轨迹编程--刻字
多工件连续循环搬运仿真
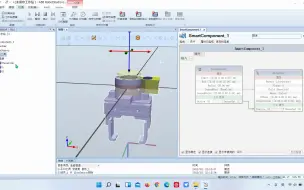
RobotStudio的smart组件系统仿真
ABB工业机器人分拣码垛
上位机颜色识别(3种)+robotstudio分拣码垛仿真
传感器的使用和单个工件搬运调试
T1-1工具坐标系创建
RAPID例行程序形参的使用
机械装置创建:CNC自动门
机械装置创建:双层料台
ABB工业机器人激光切割工作站
丝杠抓取工件坐标系更改
越疆机器人练习汇报
T1-2正方形轨迹编程
机械装置创建:CNC装夹治具
模块1的离线编程仿真
机械装置创建:弧口手爪
多工序运行
微课录制_送料单元的smart组件仿真
录制_Profinet IO的GSD文件配置
仿真视频的录制
KUKA机器人使用KRL程序语句进行拆垛码垛
数字人的密钥到底是.....
数字人故事又开始诡异了....
西门子博图HMI-报警画面组态制作
ABB机器人的OPCUA通信测试
震惊 机器人可能有了想法 现在的机器人到底发展到什么程度了,中国的机器人行业怎么样,
西门子杯中国智能制造挑战赛,工程实践赛项,六站联调。
185 多功能码垛末端
同步带轨迹仿真
传感器的使用技巧
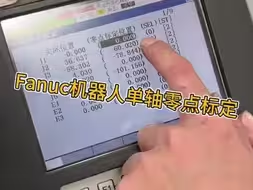
发那科机器人单轴零点标定
监控先生竟然变成了大左老师!!
MCD与ABB机器人的OPCUA通信
VEX IQ 2024-2025 风驰电掣 一代机
基于ABB660码垛机器人平衡缸的设计思路,才能将末端负载100公斤的四关节码垛机器人做到成本不比立柱高,另外求教:ABB460码垛机有平衡缸吗?
6台机械臂的同步控制
车间连续辞职了好几个员工···