V
主页
京东 11.11 红包
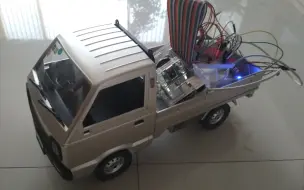
【RC】顽皮龙d12高阶玩法 树莓派arduino ros mpc控制侧方位停车 自动泊车
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【RC】顽皮龙D12 模型预测控制 自动泊车 从仿真到实践
【RC】键盘控制rc车 树莓派4b arduino nano 顽皮龙d12
【RC】顽皮龙d12 DIY测轮速模块 arduino
【RC】【树莓派】【Arduino】顽皮龙D12 室 内 定 位
【控制】模型预测控制 MPC 【合集】Model Predictive Control
【RC】顽皮龙D12 mini 无人驾驶 逮虾户
【RC】【树莓派】【Arduino】台 架 测 试
【汽车】快速开发自动泊车roscpp代码 mpc控制 五次多项式路径规划 carsim仿真
【RC】树莓派4b 顽皮龙d12 不破坏底盘改装键盘控制ros小车
【汽车】自动泊车 路径规划 CarSim仿真
【RC】顽皮龙d12 mini 逮虾户
【树莓派】【RC】顽皮龙d12 rplidar Hector_SLAM
【RC】【树莓派】【Arduino】顽 皮 龙 D12 改 罗技F710
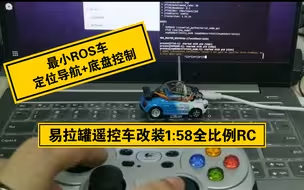
DIY最小【ROS】小车 | 低成本1/58【RC】全比例 遥控车 | 易拉罐小车改装全比例遥控车
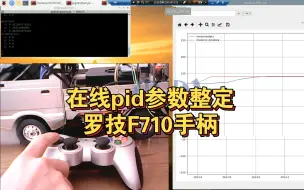
【RC】【树莓派】【Arduino】罗技F710手柄在线整定PID PID在线参数整定 顽皮龙d12
【汽车】【控制】01.04 轮胎横向动力学模型
RC小车漂移过弯 轮式 履带 顽皮龙D12
《旧手机不要丢,这样做...》你将获得ros无线数据采集终端 低成本多传感器解决方案
【树莓派】【Arduino】模糊自适应PID 电机调速 ROS L298n 代码自动生成
【树莓派】【ESP32】【Arduino】低成本ROS节点 平替Arduino
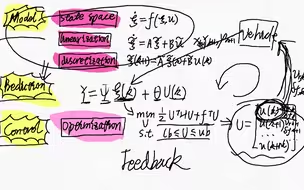
【控制】模型预测控制 MPC 01 运动学模型
【RC】【树莓派】【Arduino】自制RC遥控车 罗技F710手柄 ROS系统
【Arduino】【RC】【DIY】复摆法测转动惯量 车辆横摆转动惯量
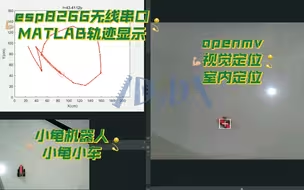
【树莓派】esp8266 - rosserial - ros
【汽车】CarSim&Simulink联合仿真 智能车MPC(模型预测控制)横向控制
【控制】Simulink自动代码生成ROS C++ 控制小乌龟 Ubuntu
【ESP8266】【ROS】【Arduino】低成本ROS小车底盘 esp8266 l298n 编码器
【Arduino】【DIY】自制低成本360度可控角度舵机
【汽车】【控制】01.03 轮胎纵向动力学模型
【RC】【Arduino】成本20块的RC陀螺仪 arduino uno mpu6050 电位器
【控制】模型预测控制 MPC 06 反馈控制
【RC】线 控 底 盘
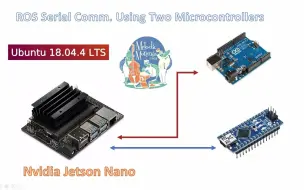
【Arduino】【ROS】rosserial连接两片Arduino 英伟达NVIDIA jetson nano ROS
视 觉 定 位
【Arduino】低成本无线监控摄像头 ESP32 Cam 舵机云台
小龟机器人 小龟小车 视觉定位 室内定位
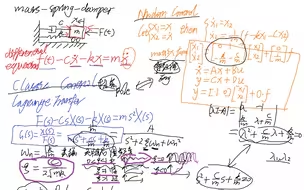
【控制】二阶系统 弹簧-质量-阻尼 动态 稳态 经典控制 现代控制 simulink simscape mass-spring-damper
【RC】桌上逮虾户
【树莓派】【旭日X3派】mems惯导 水晶惯导 ros rviz
【控制】模型预测控制 MPC 08.02 总结 修正 二次规划 目标函数