V
主页
京东 11.11 红包
【搬】MIT人形机器人欣赏
发布人
https://x.com/i/status/1813315589093646353 MIT仿人机器人利用 NMPC 展示令人印象深刻的平衡性和移动性 论文 https://arxiv.org/pdf/2407.10789
打开封面
下载高清视频
观看高清视频
视频下载器
【搬】MIT的迷你组装机器人欣赏
【搬】行走机构欣赏
【搬】Atlas欣赏
【搬】迪士尼推出人形机器人Groot Robot
【搬】行走欣赏
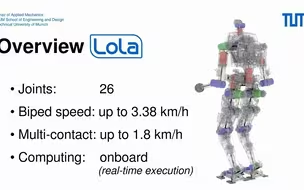
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
【搬】爬绳机构欣赏
【搬】小车悬架系统欣赏
【登长城 逐旷野】
宇树G1抗干扰性能展示 #人形机器人
【搬】飞行多体机器人的质心空气动力学建模与控制
【搬】波士顿动力30周年视频简辑
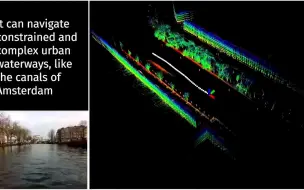
【搬】Roboat - 自主机器人船欣赏
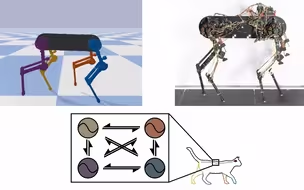
MIT humanoid9月最新的whole-body NMPC,基于ADMM方法,稳定太强了
事实证明,机器人要跑得快还要穿鞋?
优必选全新一代工业版人形机器人Walker S1,搬运挑战!
【搬】模型欣赏
记录从零驯服双足机器人day27
【搬】带磁化脚的四足机器人可以爬上金属建筑物和结构
不愧是网友开发系列之【变形金刚】欣赏
【搬】使用四足机器人爬上坚固的梯子
【搬】给舵狗安轮子欣赏
Robot Loco-Manipulation for Industrial Applications
【搬】1/6的遥控模型欣赏
MIT《计算机图形学|MIT 6.837 Introduction to Computer Graphics (fall 2021)》中英字幕(deepseek
我手搓了一款GPT4o桌面机器人
【搬】打印欣赏
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
MIT《机器视觉|MIT 6.801 Machine Vision, Fall 2020》中英字幕(豆包
【搬】使用腿式机器人对建筑进行自动检查
【搬】全方向履带小车欣赏
【搬】陀螺稳定球形小车欣赏
【搬】舒适的画画欣赏
【搬】轮滑小机器人欣赏
【搬】轮滑
Gerardo Bledt(麻省理工学院):推广和改进腿式机器人的正则化预测控制
盘点那些有趣的桌面机械臂10
【搬】爬楼梯小车
【搬】机构欣赏
【搬】在闭环中心模式生成器中学习机器人动力学的塑性匹配