V
主页
京东 11.11 红包
使用CARLA-SB3-Training-Environment训练的自动驾驶RL模型效果演示
发布人
使用方法查看 https://ihave.news/post/20240823141104
打开封面
下载高清视频
观看高清视频
视频下载器
印度的ai视频原版,真的难崩🤣
LLM-PySC2:LLM starcraft II learning environment 基于pysc2的大语言模型星际争霸2决策仿真训练环境
rl_sar现已支持go2,欢迎试用
【即插即用】Pybullet端强化学习算法训练机械臂
这年头就连木头都植入AI了
双热点强强联合的发文方向:Transformer+强化学习!
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
强化学习四足机器人一
《急冻先生和蝙蝠侠》差不多可以体现目前 AI 短片的平均水准
MPC+强化学习!Actor Critic模型预测控制,苏黎世大牛教授人类水平性能的自主视觉无人机演讲
使用ROS2-Control + RL来控制四足机器人
强化学习四足机器人二
issacgym 训练400次的效果 强化学习 人形
在IsaacLab中跑ViPlanner,代码正在PR
在IsaacLab中的UnitreeA1上重放AMP动捕数据
不愧是李宏毅老师讲的【强化学习】简直太详细了!!小白也能信手拈来,建议收藏!(人工智能|机器学习|深度学习|强化学习)
今天把我做的这个机械臂开源
Go2翻车视频
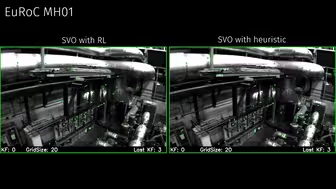
强化学习给视觉里程计自适应调参
众擎SE01自然步态行走日常调试花絮
【熟肉】Evil用电击项圈灵魂拷问Vedal
【李宏毅】强化学习课程完整版千万不要错过!简单明了的PPO算法讲解!深度强化学习、人工智能、机器学习、大模型
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
直观理解大模型预训练和微调!四大LLM微调方法,RLHF基于人类反馈的强化学习微调
从AI时代被看衰到彻底拥抱AI➡️Adobe终于不装了
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
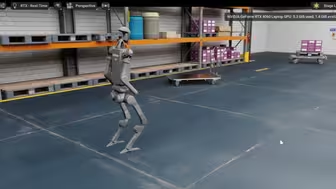
人形机器人sim2sim行走测试
【MPC+强化学习】四大名校教授精讲强化学习和模型预测控制18讲!Actor Critic模型预测控制、策略梯度方法
内部曝光!马斯克巨资打造全球最大AI计算中心!塞满英伟达H100显卡
【共享LLM前沿】直观理解大模型预训练和微调!P-Tuning微调、Lora-QLora、RLHF基于人类反馈的强化学习微调,代码讲解
GPT4O1是强化学习和大模型的一次成功融合
大模型如何增强强化学习?简单粗暴理解大模型训练中的人类反馈强化学习RLHF!PPO算法、ChatGPT背后的数学原理
强推!北京大学王树森半天就教会了我深度强化学习,原理详解+项目实战,学不会来打我!
【Stable Diffusion】2024最强换脸插件! SD保姆级AI人像换脸教程,真的太变态了!快给我整虚了!无需训练,一键换脸小白轻松实现还原人像艺术!
从模型预测控制到强化学习12:DDPG做动态控制-研究生入学培训答疑
残酷的真相:视觉训练这么多年,FSD只认识“STOP”一种标识!
机械手爬行
【基于深度强化学习的冠军级别无人机竞速】强化学习和模型预测控制MPC中英字幕18讲!
在isaaclab中开发viplanner端到端导航
终于可以站起来了,就是lstm训练的慢了好多…