V
主页
京东 11.11 红包
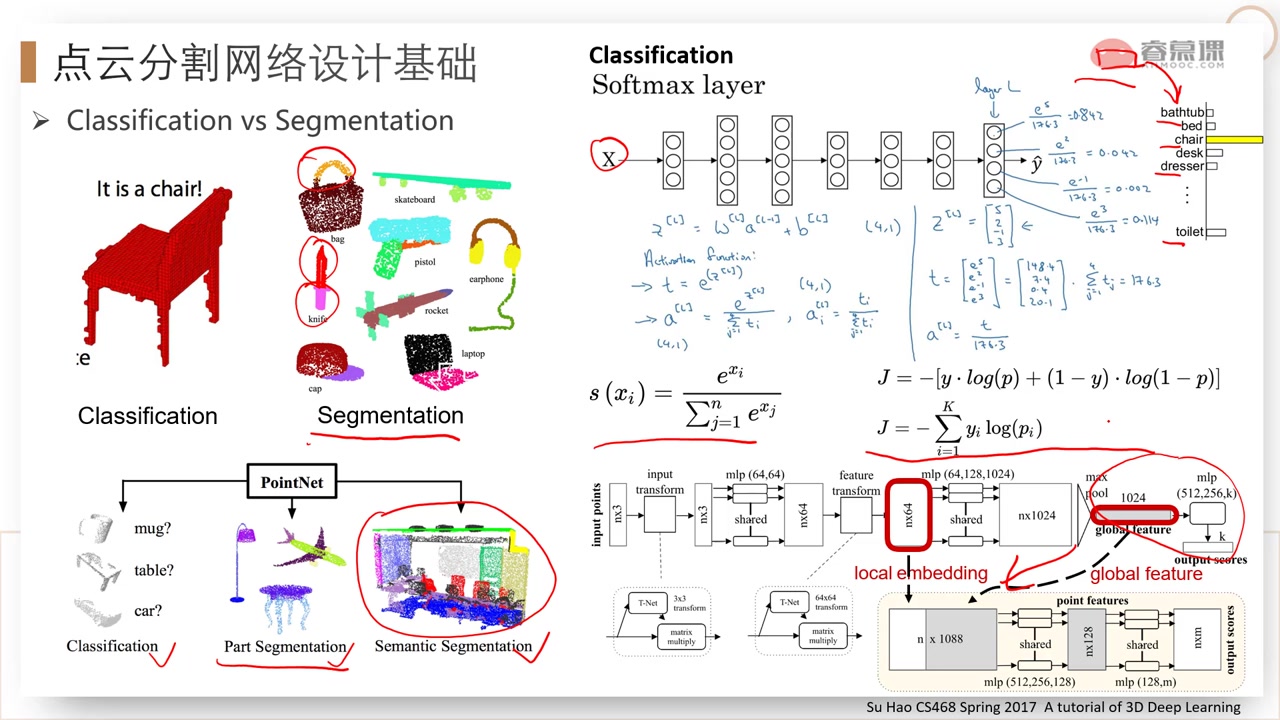
9-1 点云分割网络设计基础
发布人
转载 转载
打开封面
下载高清视频
观看高清视频
视频下载器
8-2 点云分类网络设计基础(下)
10-1 点云注册网络设计基础(上)
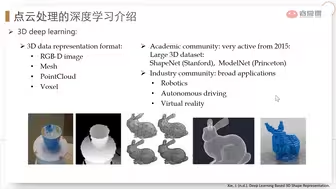
7-6 点云处理的深度学习介绍
10-2 点云注册网络设计基础(下)
8-1 点云分类网络设计基础(上)
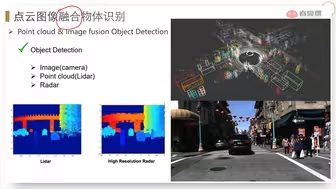
13-1 点云图像融合物体识别基础(上)
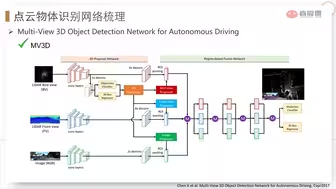
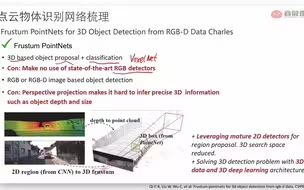
12-6 点云物体识别网络梳理(下)
2-SAR数据处理准备
12-5 点云物体识别网络梳理(上)
13-7 点云物体识别网络梳理
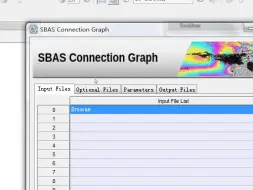
8-SBAS处理
1-ENVI_SARscape基础
12-4 深度学习点云物体识别任务指标
13-2 点云图像融合物体识别基础(下)
11-1 点云重识别和重定位方法
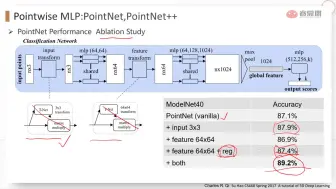
8-4 Pointwise MLP:PointNet,PointNet++(下)
14-1 深度学习与激光SLAM的结合点
9-6 Convolution-based:KPConv
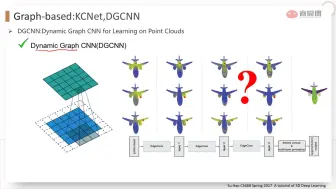
9-3 Graph-based_DGCNN
6-DInSAR处理
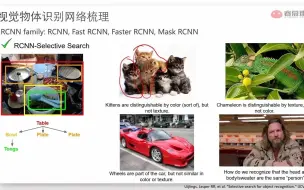
13-3 视觉物体识别网络梳理
7-PS数据处理
4-多时相SAR数据处理
8-3 Pointwise MLP:PointNet,PointNet++(上)
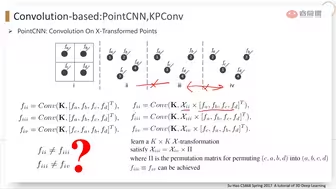
9-5 Convolution-based:pointCNN
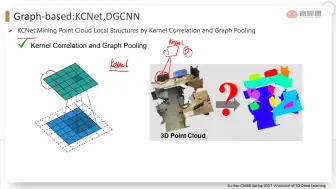
9-2 Graph-based_KCNet
3-单通道SAR数据的处理
12-3 3D Datasets
9-4 Data Indexing-based_SO-Net
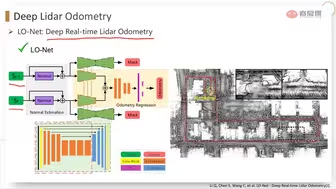
14-3 Deep Lidar Odometry(下)
10-3 Metric based:3DMatch
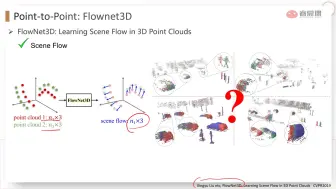
11-2 Point-to-Point:Flownet3D
你的手机号绑定了多少app?一键教你查询➕解绑!
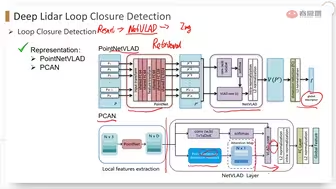
14-4 Deep Lidar Loop Closure Detection
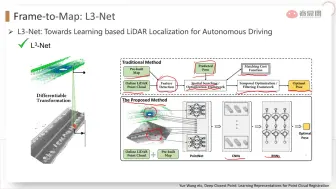
11-5 Frame-to-Map:L3-Net
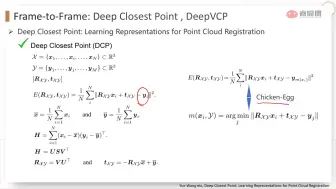
11-3 Frame-to-Frame:Deep Closest Point
13-4 RCNN family:RCNN,Fast RCNN,Faster RCNN
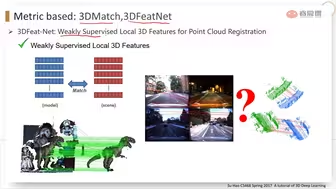
10-4 Metric based:3DFeatNet
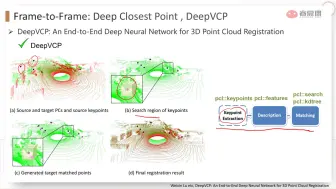
11-4 Frame-to-Frame:DeepVCP
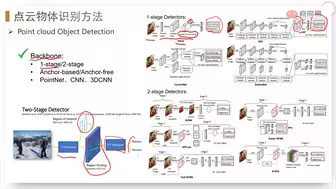
12-2 Point cloud Object Detection(下)