V
主页
利用P2P通信实现多车间避碰
发布人
提出一种多车间交互协议,来分配各自行驶区域。由此,依托多车间使用P2P通信,实现交高速运动下得相互避碰。相较于已有工作,实现了分布式机载计算,取消了多车间时钟同步,通过理论保证安全性,适用于大规模异构系统。
打开封面
下载高清视频
观看高清视频
视频下载器
多个机器人在运动时卡在一块了怎么办 IEEE TAC
密集障碍物情况下的多机器人运动规划 IEEE RAL
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
《智能网联汽车》暑期实训研学营精彩回顾
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
【Python】振动抑制——改进输入整形
Lattice路径规划
【Python】振动抑制——输入整形
协同控制 运动规划等前沿研究 by 代尔夫特理工认知机器人学副教授Javier Alonso-Mora
基于通信的多车避碰paper和code发布了(见简介)
端到端自动驾驶与传统规控的爱恨情仇?
看完世界机器人大会,我觉得工业革命快了......
全球最大单笔智能驾驶重卡交付 | 中通快递400台
马斯克炫耀新机房,特斯拉超级计算集群内部曝光
求解器泰坦电视【一刀打开了开学的门】
frenet坐标系-基于参考线的车辆轨迹规划方法
我的ESP32机器人已经可以扫码连网啦
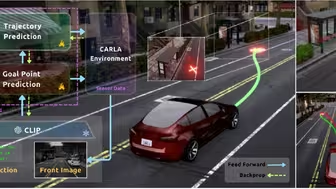
轨迹预测会不会被端到端干掉?Path-based的轨迹预测还有未来么?
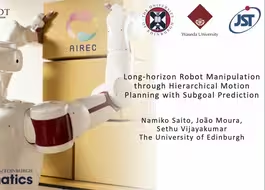
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
小米汽车自动驾驶失灵
特斯拉五年内至少涨五倍,但99%的人会被甩下车
做了一个时速超过一百每小时的扫地机器人
特斯拉将安装一种比激光雷达更先进的雷达
发明这个机械夹持机构的真是牛得冒烟啦苹果生产用
“害怕是源于不了解”- 中通快递自动驾驶司机说
受液滴表面张力启发的可变刚度变形轮|2024 Science Robotics【韩国科学技术大学】
智驾产品经理工作VLOG
特斯拉的完全自动驾驶功能在中国市场可能成为“关键差异化因素”
现阶段所有智驾都会出车祸,以粉丝投稿的华为nca为例,不要再宣传什么智驾安全是最大的豪华了,你都确保不了安全,还豪华啥啊?
反骨装修!不听老人言,幸福享不完
马斯克发布视频揭秘特斯拉AI算力集群内部,堆满英伟达GPU!!
真假端到端 | 华为、小鹏如何抵御特斯拉FSD
宇树科技的竞争对手 | 中国深圳机器人公司 | 逐际动力 | 融资超2亿元 | 开发3款机器人产品 | 了解逐际动力 怎能错过这个视频 | 云深处科技
全网炸裂!NEO机器人原型曝光,网友惊呼:这货不是机器人,是人!
体验完华为ADS智驾3.0后,“我怂了”
8000元二手新能源车跑顺风车第二天
哈工大和华中科技大联合研发激光智能除草机器人,无需使用农药,1小时能够除草10万颗。
“保持热爱 共赴山海”河北工业大学 山海机甲战队2024赛季总结暨纳新宣传视频
【开源自动驾驶小车】低成本DIY自动驾驶的智能小车
特斯拉FSD竟然提前预判了大货车轨迹躲过一劫,FSD明年第一季度入华啦