V
主页
京东 11.11 红包
四旋翼逆天的运动能力-拉菲罗·安德烈
发布人
原标题:The astounding athletic power of quadcopters _ Raffaello D'Andrea 十年过去了,感觉国内也没几个团队达到这个水平,革命尚未成功,同志仍需努力~
打开封面
下载高清视频
观看高清视频
视频下载器
四旋翼挂载控制2.0
四旋翼立起倒立摆难度不够?那就传起来~
光流悬停,效果不错
远程控制无人机
未来飞行器靓瞎你的眼 — 拉菲罗 安德烈
四旋翼挂小手 雷,终于不那么晃了~
妹妹的最后通牒!
“御风250”挂水扰动测试
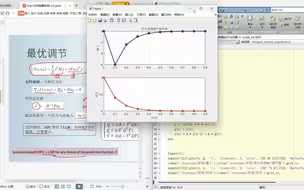
【火力教育】 MPC原理与四旋翼控制 第二节 MPC调节器代码讲解
韩国无人机撒传单内容很炸裂。…
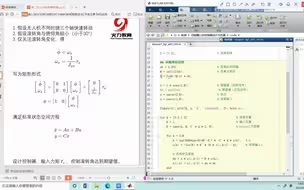
【火力教育】四旋翼LQR控制器设计 (第二节 LQR控制器仿真)
【火力教育】四旋翼LQR控制器设计 第二节 LQR控制器原理
实测四旋翼飞行
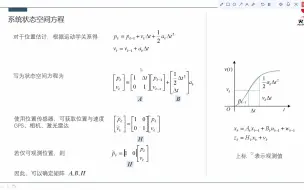
【火力教育】卡尔曼滤波位置估计原理
【火力教育】 MPC原理与四旋翼控制 第二节 MPC调节器原理
从零开始制作四旋翼无人机 EP0 - 项目整体思路介绍
从零开始制作四旋翼无人机 EP1 - 硬件原理图与PCB介绍
【火力教育】四旋翼建模与控制-课程介绍
【调试记录】气压定高,GPS定点
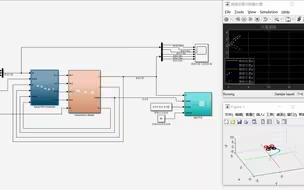
【火力教育】好看的模块千篇一律,深刻的原理万里挑一(四旋翼建模与控制 matlab+simulink仿真)
【四旋翼360°翻转】这个东西是好玩,就是有点费飞机
5大改善【步进电机】系统精度的妙招,快来看吧
韩国无人机丑闻,简直丢人丢到家了!
四旋翼LQR姿态控制器负载不平衡实物测试
中国无人机在沙特表演以后,暂时回不来了
【火力教育】四旋翼建模与控制-第一节 动力模型
摇摇晃晃的四旋翼
【火力教育】 MPC原理与四旋翼控制 第一节 课程介绍
【Python】人形机器人——全身控制
Anduril发布Bolt-M便携式自杀无人机
【自制】F405飞控(开发记录)
Python底层运控
【EtherCAT同步周期快至100us】超高实时性PCIe EtherCAT控制卡PCIE464
军校也来啦!海军航空大学限时载运比赛实录
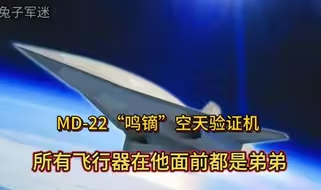
速度7马赫的鸣镝22空天验证机,已经完成多次技术实验。
我有车机协同,谁敢惹我~~~
【火力教育】四旋翼LQR控制器设计 第一节 课程介绍
labview玩转正运动控制卡
〖航模整活〗那天,四旋翼和固定翼喝醉了?
全面了解主流运动控制 C#+运动控制 | 雷赛控制卡8轴 | 从开卡到编程详细教程DMC3800(C#/雷赛/控制卡/运动控制/机器视觉)B1046