V
主页
京东 11.11 红包
EV3直线对齐,再大的角度都没有问题,还有Python代码实现
发布人
EV3直线对齐,再大的角度都没有问题,还有Python代码实现
打开封面
下载高清视频
观看高清视频
视频下载器
让机器人走直线,简单吗?
WRO,FLL最实用技巧,EV3加速,减速,精确直线,偏差调整,全在这里
带速度补偿的比例巡线,太香了!
乐高EV3直线对齐
陀螺仪还可以这样用?用陀螺仪来动态补偿直线行驶!
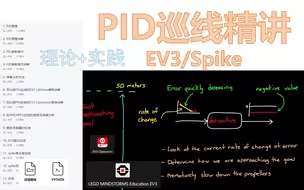
PID巡线精讲-理论与实践
WRO机器人如何快速准确转向
WRO 2020直线行驶偏差测试
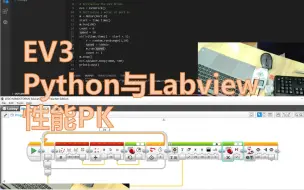
python与Labview在EV3上性能大PK
WRO2021任务试做, EV3 classroom代码分享
如何准确巡线到黑线?WRO实战技巧
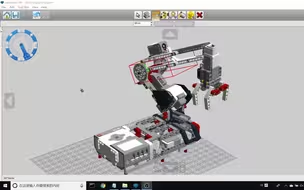
乐高机械臂LDD模型讲解及LDD高级使用技巧
LEGO EV3陀螺仪的秘密,你都知道吗?
拥有自己的自动字幕和翻译工具,开源代码Autosub深度解析
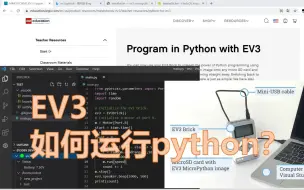
EV3上如何运行Python?
LEGO EV3 Classroom如何进行多线程控制
LDD演示齿轮传动-LDD高级技巧
EV3 Classroom 入门介绍
乐高 EV3 智能机械臂 编程解析-Part1
WRO2020小学组转动机械手搭建方案分享
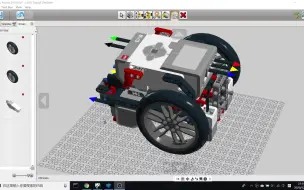
为什么在Studio里导入EV3和Inventor,主机,传感器和马达都失败呢?
巡线搬运任务,WRO基础教学
EV3 Classroom实现PID巡线有哪些坑?未校准电机去哪了?
WRO2020路径规划
死磕巡线,直觉不一定正确
Lego EV3 FLL基础车拆解
探究直线巡线的关键,如何才能更加稳定的巡线,WRO2021实战!
EV3移动转向模块背后的逻辑
如何提高EV3颜色传感器的颜色识别精度
Spike+Python基础系列-DistanceSensor也有惊喜
Spike+Python基础系列-压力传感器
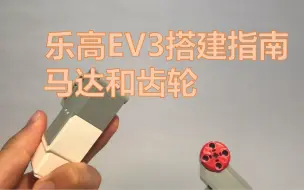
乐高EV3搭建指南7-马达和齿轮
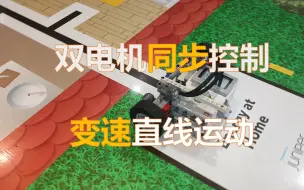
EV3双电机同步变速直线行驶
EV3 PID巡线误差分析及参数调节方法
WRO2020小学组编程实战
使用google API 演示Autosub安装和中文识别,及B站字幕投稿
Spike+Omni实现全向运动,还有理论与Python实现
Spike+Python基础系列-强大的ColorSensor
WRO路径长度,自动测量方法
靠EV3视频进入MIT,什么让他在停止更新视频后一年又回来了?