V
主页
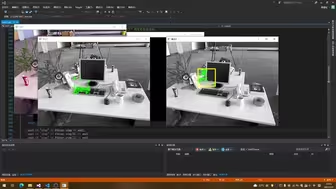
【ORB_Tracking】目标追踪之描述子点对儿的疑问
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【ORB_Tracking】目标追踪之统一角度再比较描述子
【ORB_Tracking】ORB目标追踪(2)之描述子计算
【ORB_Tracking】目标追踪之描述子比较(可能是全网最细节)
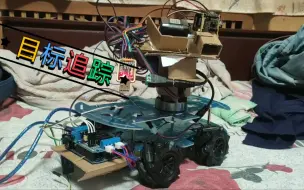
【记录】云台锁定目标追踪
【ORB_Tracking】用ORB做目标追踪 试验总结1
【目标追踪小车】小车代码电脑端python(自用备忘)
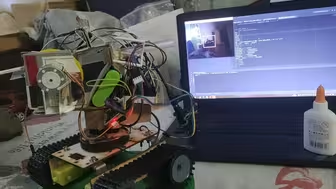
【目标追踪小车】基本功能阶段完成
追踪目标小车计划备忘
【目标追踪】之FAST算法小试vs2015
试验 无限制旋转炮塔 可追踪指定目标
【目标追踪小车】esp32cam代码(自用备忘)
【目标追踪小车】小车移动捕捉目标
【目标追踪小车】目标追踪-2021-12-26 10:53:21
准备使用 orb slam2的特征点法 均匀化 来匹配
【目标追踪小车】麦轮底盘代码 (备忘)无改动
【ORB SLAM2】UBUNTU 16.04 安装ROS
【学写模块】SLAM2找特征点
【记录】百元级 低配版 仿“步兵” 机器人
关于低成本双目摄像头测距的想法
【slam】热烈庆祝ORB_SLAM2跑数据集成功!下面马上ROS
【自制激光靶】起倒靶雏形
ESP32CAM WIFI PC 自动瞄准目标火控系统可行性探索 可应用于 模型玩具
【激光射击训练靶】粗装完成 介绍一下
【尝试单摄像头测距】网上的代码测试
【目标瞄准系统】硬件连接试验 ESP32CAM 通过4988驱动42步进电机
【趟坑传】dso slam 一起定位与地图构建 之 前传 效果演示
改线径还是增加圈数
平衡小车 焊点问题 故障排除过程记录
传输不畅是WIFI的问题,换了一个 好了
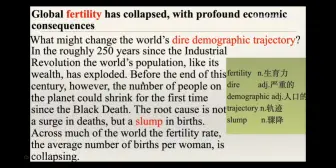
练习阅读 fertility collapsing
尝试自制双目摄像头【想法】
【趟坑实录】 dso slam (一)一起定位与地图构建 之 安装Ubuntu 16.04
平衡小车 主体完工 准备调试代码
[随想系列】20181116 有没有这样一种元件 高电平时显示1低电平时显示0
【傻瓜模块】舵机驱动模块设想
【趟坑实录】咸鱼35元双目摄像头之 打开摄像头双目模式 ubuntu
【经验总结】 傻瓜化PID 之 加入阻尼效果
【记录】换了个方案 之 水平稳定
【电子的发现】知识总结
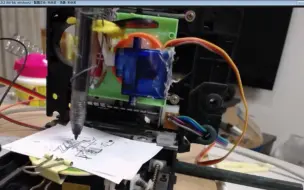
[mini cnc plotter] 迷你数控绘图仪 (改方向键控制代码)