V
主页
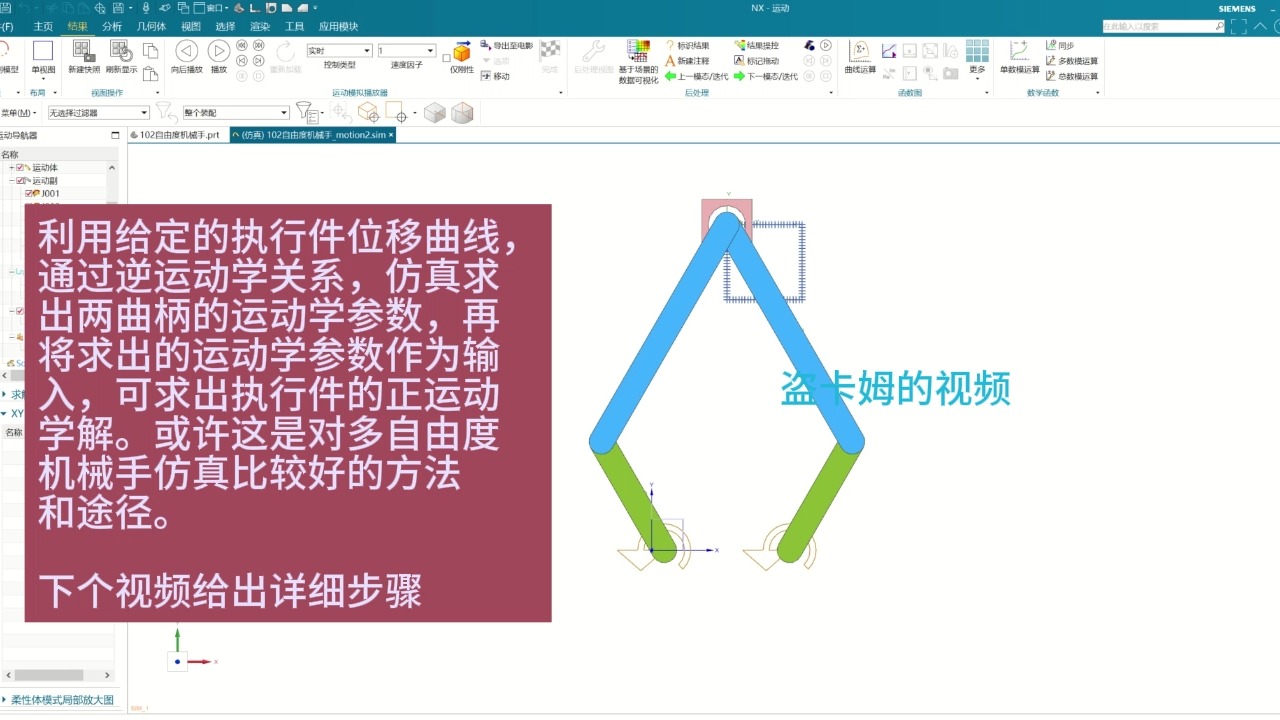
10-基于UG/NX的两自由度机械手仿真策略(1)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
03行星轮系-太阳轮输入-行星架输出ug仿真
12-UG/NX的弧面分度凸轮机构运动仿真
01行星轮系的运动仿真-行星架输入-内齿圈输出
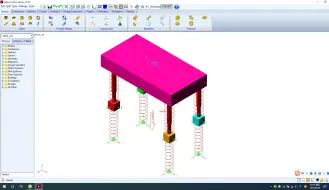
UG/NX的2自由度机械手运动仿真
02行星轮系的运动仿真-太阳轮输入,内齿圈输出
UG 监护人相关的一切~写的很极端~误入请去听清洗
UG/NX运动仿真-线在线上副和点在线上副(平面凸轮机构)
灵活机械手挑战极限姿势!
08棘轮棘爪机构运动仿真
【Adams】第四讲:汽车整车模型(7自由度)动力学仿真
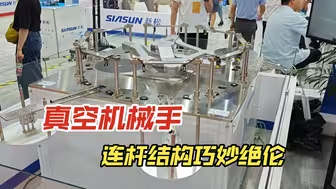
机器人大会:真空机械手
UG曲面建模——曲面建模的思路分享
UG慎入 SP向 摄魂者
ug无声 强体感 瘦骨嶙峋 0.1秒去除多余脂肪 41kg 纸片人
UG曲面建模渐消储物瓶
基于UG的螺旋-杠杆微动机构仿真
电动推杆机器人
05齿轮副仿真的两种方法
基于Multisim的10路抢答器设计与仿真
带渐消曲面产品UG建模
UG NX如何让黑悟空stl文件转stp格式
UG曲面建模——创意垃圾筒
UG NX的螺旋运动仿真
【Adams】第二讲:汽车单轮模型(2自由度)动力学仿真
[机动战士高达]线驱机械手,3D打印
【Adams】第五讲:汽车整车模型+动力总成悬置(13自由度)动力学仿真
全自动焊接机器人机械手工作站生产线
双轴双工位桁架机械手设计,桁架机械手设计思路
【Adams】第三讲:汽车半车模型(4自由度)动力学仿真
ANSYS WB 拉伸断裂仿真
教你在UG中如何把草图标注直接转成PMI标注
【自制ug】35kg*极端瘦
论:护手霜对机械手的重要性 【夹爪21】
UG建模标准M10*30内六角螺纹——适合新手
全自动化焊接机器人机械手工作站生产线
【吾思UG建模教程】经典UG曲面模型练习,新手小白和老师傅都要学会!
叶强PLC再次对五轴移载机械手输送线作出图纸与程序上的改进,在有限时间内,让学员学到更关键重要的东西
【极端ug】慎入!/超强骷髅美
揭秘机械手定位抓取原理,让你一秒变专家!!! 《机械手定位抓取》
基于手势检测控制灵巧手【仿真】