V
主页
2.2.5_话题通信_自定义接口消息(C++)_02发布方实现
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2.2.3_话题通信_原生消息(Python)_01发布方实现
2.2.4_话题通信_自定义接口消息_接口文件
1.5.1_ROS2体系框架_文件系统_02编码风格说明
1.4.1_集成开发环境搭建_VSCode_04程序编写
2.2.2_话题通信_原生消息(C++)_01发布方02框架搭建
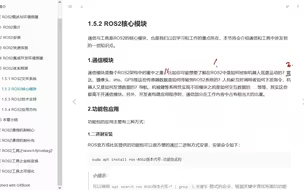
1.5.2_ROS2体系框架_核心模块_01通信相关
2.3.2_服务通信_自定义服务接口
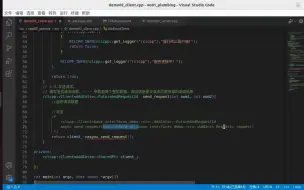
2.3.3_服务通信_C++实现_03客户端实现_05发送请求处理响应
1.5.1_ROS2体系框架_文件系统_04配置文件
2.2.2_话题通信_原生消息(C++)_02订阅方02订阅逻辑以及小结
2.2.2_话题通信_原生消息(C++)_01发布方03发布逻辑
1.2.1_ROS2安装_步骤3设置软件源
2.2.5_话题通信_自定义接口消息(C++)_01框架搭建
1.5.1_ROS2体系框架_文件系统_05常用命令
1.4.1_集成开发环境搭建_VSCode_03includepath配置
5.5_坐标变换工具
5.6.5_乌龟护航launch_Python01护航上
5.6.3_乌龟跟随(Python)_01生成乌龟上
1.5.4_ROS2体系框架_应用方向
2.3.3_服务通信_C++实现_02服务端实现
5.3.9_坐标点发布_Python实现
2.2.6_话题通信_自定义接口消息(Python)_02发布方实现
2.4.3_动作通信_C++实现_02服务端_02回调函数定义
2.2.0_话题通信_场景、概念、作用与消息接口
2.2.8_话题通信_小结
1.2.1_ROS2安装_步骤4安装
5.3.2_静态广播器_命令实现(上)
【赵虚左】《ROS理论与实践》第8、9章--ROS机器人操作系统
5.6.1_乌龟跟随_案例分析
1.1.2_ROS2简介_ROS2组成体系
1.3.2_ROS2快速体验_HelloWorld(C++)_01基本流程
6.4.2_URDF语法02_link_02使用
1.6_本章小结
5.6.2_乌龟跟随(C++)_01生成乌龟上
2.3.3_服务通信_C++实现_01框架搭建
2.3.3_服务通信_C++实现_03客户端实现_04连接服务BUG说明
4.3.4_launch之xml、yaml_文件包含
1.2.1_ROS2安装_步骤2启动universe存储库
2.3.4_服务通信_Python实现_03客户端实现_03请求处理以及小结
1.5.1_ROS2体系框架_文件系统_01概览