V
主页
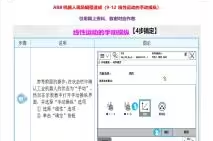
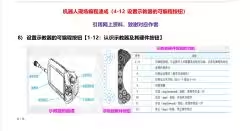
ABB机器人现场编程速成(10-12 重定位运动的手动操纵)
发布人
手动操纵之重定位运动
打开封面
下载高清视频
观看高清视频
视频下载器
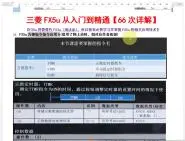
FX5u入门到精通(37.梯形图+ST语言混合编程案例1:扩展启保停)
ABB机器人现场编程速成(12-12 RAPID编程实战B-B)
ABB机器人现场编程速成(6-12 恢复工业机器人数据)
EPLAN P8初级应用:电机正反转控制控制电路(3-10)
三菱机器人全过程支持软件RT ToolBOX3 画长方形仿真小视频
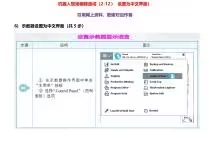
ABB机器人现场编程速成(2-12 设置为中文界面)
大学生六步成长为CNC行业大师(1-30 6步简介)
FX5U入门到精通【42.ST语言应用(5-29:普通指令电机即可点动也可长动控制之ST与梯形图比较】
EPLAN P8初级应用:变更触点映像(文件)的显示位置美化图面(8-10)
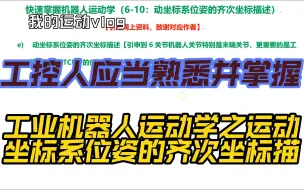
快速掌握机器人运动学(6-10:动坐标系位姿的齐次坐标描述)
FX5u入门到精通(33.方便指令应用A)
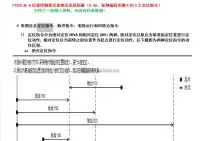
回复网友要求:对一体机模拟量现场及远程控制案例之远程细化(3-5)PLC程序上传下载
危险,“抱薪者”可能倒在风雪中(含有负能量,不喜就K)
本科生10年修炼成总监:工控总监指引AI替代白领(1-30)
KUKA robot系列库卡机器人手动操控
ABB机器人现场编程速成(11-12 RAPID编程实战A-B)
FX5U+JE-A位置控制模式案例及实战拓展(5-36:案例编程步骤4和5之定位指令)
三菱FX5u+HMI柔性家用密码锁(2-5:操作实物之设定参数)
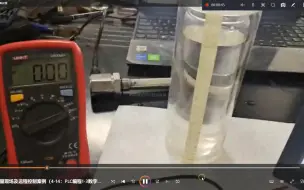
一体机模拟量现场及远程控制案例(4-14:PLC编程1-3数字量)
大学生六步成长为CNC行业大师 (16-30 UG(7.0中文版)CAM4-5)
ABB机器人现场编程速成(9-12 线性运动的手动操纵)
本科生10年修炼成总监:PLC技术的五个级别(2-30)
FX5U+JE-A位置控制模式案例及实战拓展(22-36:元器件之触摸屏GOT)
快速掌握机器人运动学(1-10:学习目的、实现方法)
FX5U+JE-A位置控制模式案例及实战拓展(8-36:案例编程步骤4和5之多表格运行指令)
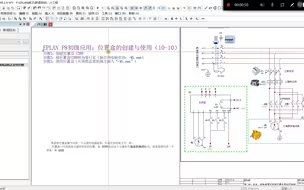
EPLAN P8初级应用:位置盒的创建与使用(10-10)
三菱FX5u+HMI柔性家用密码锁案例(2-8:案例目标及制作工具)
ABB机器人现场编程速成(4-12 设置示教器的可编程按钮)
回复网友要求:对一体机模拟量现场及远程控制案例之远程细化(1-5)调试PLC程序
FX5用户手册(定位篇)介绍3-5:参数详细内容及具体设置方法B
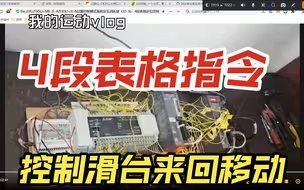
FX5U+JE-A位置控制模式案例及实战拓展(33-36:4段表格定位指令控制演示)
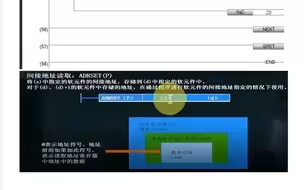
FX5u入门到精通(24.变址寄存器应用:理论)
仿真:FX5U巧用三角函数等指令求等角梯形面积
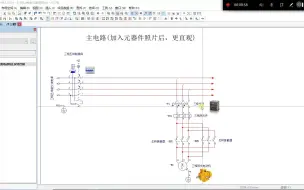
EPLAN P8初级应用:电机正反转主电路J加实物图片(4-10)
三菱FX5u+HMI柔性家用密码锁(3-5:密码正确开锁)
三菱FX5u+HMI柔性家用密码锁案例(6-8:HMI组态详细步骤A)
FX5U+JE-A位置控制模式案例及实战拓展(18-36:元器件表)
计数器实战-FX5u和触摸屏报警器案例(PLC与屏联合仿真)
ABB工业机器人离线编程与虚拟仿真(1-20概述)
快速掌握机器人运动学(7-10:建立机器人坐标系方法)