V
主页
机器人坐标系要与不要之解析
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
第七章ABB机器人程序编写(一)
第七章ABB机器人程序编写(三)
移动地轨外部轴的创建
ABB RobotStudio 自动生成路径功能的运用
第七章ABB机器人程序编写(二)
第六章机器人程序数据
第五章ABB机器人坐标系(二,工件坐标系)
第四章机器人I0信号的配置(二)
第四章机器人IO系统配置(一)
ABB工业机器人工具坐标现场标定教程
第三章ABB工业机器人基本操作
ABB机器人坐标系(一工具坐标系)
第二章-业机器人的基本认知
现场ABB机器人硬件讲解介绍
流水线搬运——吸盘Smart组件的创建
ABB机器人双工位预约程序,中断程序的应用
流水线搬运——吸盘制作和安装(一)
流水线搬运——流水线制作(三)
机器人工具的创建
ABB机器人输送链跟踪仿真工作站
ABB机器人模拟写字仿真动画
机器人离线编程仿真工作站
第一章工业机器人概述
致机电,工业机器人、智能制造等专业大学生的一节课
ABB工业机器人工件坐标现场标定教程
工业机器人在自动化领域的应用
机器人机床上下料
智能制造模拟产线展示赏析(机器人上下料,VGA小车,立体仓库)
视觉引导之——随机生成(一)
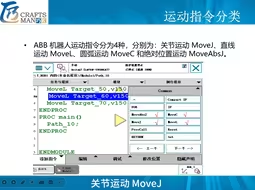
ABB机器人运动指令详解
服务,特种,仿生机器人合集欣赏
视觉引导之——轨迹规划和生成(二)
工业机器人系统组成和本体介绍
工业机器人应用行业和就业指导
工业机器人基本应用和操作—结构和选型(一)
机器人冲压产线仿真
中厚板开坡口多层多道焊
[开源]迷你停车场车牌识别收费系统
笔杆全自动生产线,科技改变生活
海克斯康三坐标PC-DMIS建立坐标系的常用