V
主页
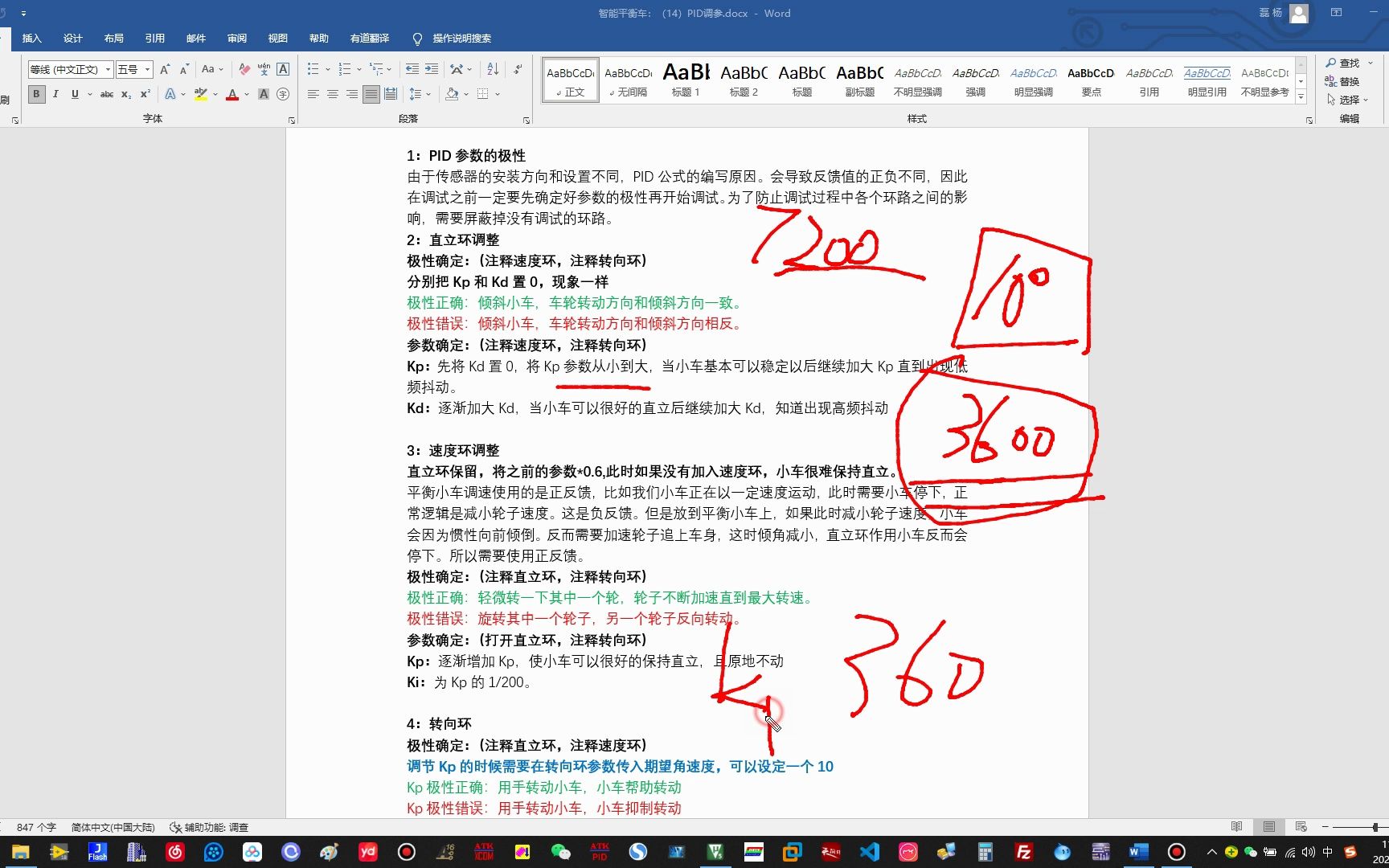
智能平衡车:(14)PID调参
发布人
智能平衡车:(14)PID调参
打开封面
下载高清视频
观看高清视频
视频下载器
智能平衡车:(12)程序编写:平衡控制算法
智能平衡车:(2)PID控制算法初步了解
智能平衡车:(6)平衡车物理模型及PID分析-直立环
智能平衡车:(1)硬件选型和原理图设计
智能平衡车:(13)程序编写:蓝牙遥控
平衡车翻跟头演示,稳如泰山
智能平衡车:(7)平衡车物理模型及PID分析-速度环
智能平衡车演示
四轴无人机:前言
智能平衡车:(4)PID控制算法-积分项
智能平衡车:(10)程序编写:编码器
智能平衡车:(3)PID控制算法-比例项
智能平衡车:(5)PID控制算法-微分项
四轴无人机:(3)遥控器协议和代码
四轴无人机:(1)硬件选型
智能平衡车:(9)程序编写:系统框架分析
四轴无人机:(13)开源万岁
智能平衡车:前言
平衡车杂技表演
四轴无人机:(2)遥控器原理图设计
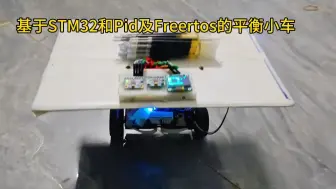
基于STM32和PID及Freertos的平衡小车
手把手教你做六足机器人!
四轴无人机:(6)单级PID控制原理
沉迷游戏、短视频、熬夜,自己把自己废掉的人生
像开发单片机一样开发linux驱动
模型开发STM32平衡车第十课:建立平衡车PID控制平衡环/角度环模型(1)
平衡小车,三环pid控制
四轴无人机:(10)串级PID控制代码
QEMU模拟开发板
四轴无人机:(8)单级PID参数整定
四轴无人机:(11)串级PID参数整定
模型开发STM32平衡车第九课:建立PID算法模型并生成代码进行电机控制(2)
模型开发STM32平衡车第八课:建立PID算法模型并生成代码进行电机控制
已毕业准许[开源]来看看我的嵌入式毕设
像单片机一样直接操作寄存器编写Linux驱动
“人一辈子,只能靠长期去做某一件喜欢的事情来成就自己,而不是靠某一个人来成就自己。关于这点,你要么及早领悟,要么等待时光给出教训,逼迫你领悟”
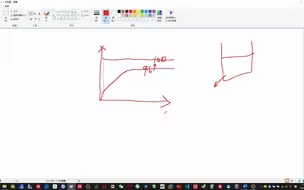
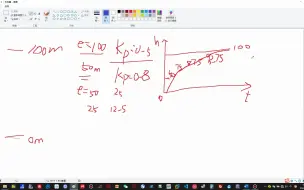
PID控制平衡车,从直立环速度环到转向环。第一步调直立环和速度环很重要,保证抗干扰能力要强
如何建立系统化的个人成长方法论
【高阶学习法】迭代升级你的大脑与认知6 — 最简单的提升注意力方法
面包板插一个平衡小车,帮我看下算不算稳