V
主页
LGSVL Simulator 一个高保真的自动驾驶仿真器
发布人
本期虹科云课堂给大家邀请到了LG硅谷研发中心高级软件工程师路强,本次演讲路工主要给大家分享如何利用LG开源自动驾驶仿真技术降低无人车测试的成本,在绝对保证人身安全的情况下来验证自动驾驶软件。仿真器借助Unity HDRP来创建高画质的数字孪生环境,并对自动驾驶汽车诸如摄像头、激光雷达、雷达、GPS和惯性测量设备(IMU)等传感器进行模拟。
打开封面
下载高清视频
观看高清视频
视频下载器
边缘计算与自动驾驶
最新FSD挑战纽约周末通行!大量场景对标国内,地狱难度!
【4K双语字幕】特斯拉 Tesla We,Robot 发布会 | Robotaxi Robovan Optimus
4D高清成像雷达 – 在汽车及车路协同领域的应用
米兰无人驾驶地铁M4 全线开通*前方展望4K
Cybercab无人驾驶出租车惊艳亮相 | 中文语音
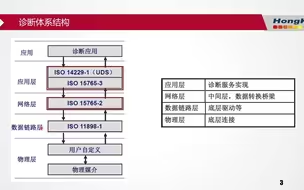
【汽车总线技术】UDS诊断基础讲解合集
特斯拉Robotaxi无人出租在中国处于什么水准?
自动驾驶的硬件在环测试方案
CAN总线测试软件(PE6)基本使用方法
【汽车总线技术】远程诊断
【模块化仿真测试】BMS电池组仿真测试方案
【全站首发 | 开通1周年纪念LCD2】福州地铁4号线原声原速沉浸式体验LCD(帝封江——凤凰池)全程LCD仿制
【虹科云课堂】IEEE 802.1AS-2011 时间同步
特斯拉FSD无人驾驶我就敢用,因为出事了全网帮我维权!
激光雷达,要被淘汰了?
【工业通讯】认识工业通讯技术
软件定义汽车背景下OTA发展趋势
TopGear更新 | 试驾特斯拉Robotaxi-无人驾驶未来已来?
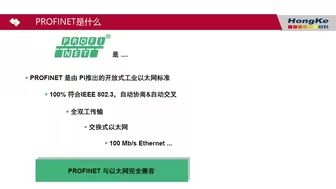
【工业通讯】PROFINET协议基础知识
FSD V12.5.4测评 ASS(增强智能召唤)
【汽车总线技术】PCAN二次开发
特斯拉“WE, ROBOT”中文语音发布会,Cybercab无人驾驶出租车惊艳亮相 | 中文语音
【西安地铁10号线】西北首座公轨合建桥!井上村→昭慧广场(全程)原速原声前方展望
【汽车总线技术】OBD诊断及应用(GB3847)
OBD2——一个简单介绍
基于CAN、LIN总线的汽车零部件测试方案
2024年10月6日信息差
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
【知识讲解】用于开关控制的平台——PXI和LXI
虹科分享 | 基于C#语言的PCAN二次开发
用于IEC 61850数字变电站的HSR、PRP和PTP技术
端云协同的智能诊断和网络安全技术
虹科-CAN总线记录仪
无方向盘、无踏板!特斯拉发布无人驾驶“We,Robot”发布会高清视频
【工业通讯】CANopen讲解合集
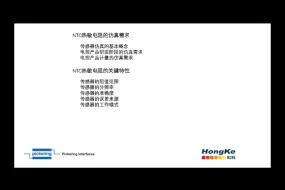
【模块化仿真测试】多路NTC型热敏电阻温度传感器的仿真方法
Ai机器人和自动驾驶 老美和我们差距在哪里
CAN总线基础之物理层篇-虹科云课堂
EtherCAT IO