V
主页
ros功能包与工作空间简要操作。
发布人
ros的工作空间与功能包创建,运用make编译系统,cmake编译系统,catkin编译系统。
打开封面
下载高清视频
观看高清视频
视频下载器
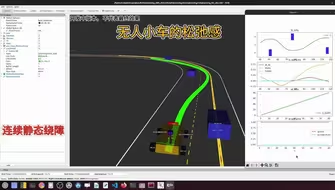
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
NUC+PX4+Mid360|无人机整体方案分享
Unitree 2024 ROS暑期学校课程视频03-人形机器人运动控制分享
gazebo导入gazebo_models模型库方法。
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
为了免费玩黑神话悟空,一天在我网站看700小时,流量直接欠费了。
移动机械臂抓取
ubuntu18.04安装ros的melodic版本。
《松灵ROS2开讲啦》第四期直播课:ROS 2代码实践
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
ICRA复现:基于MAPPO的多机器人探索建图机制
win11安装anaconda环境并为pycharm配置安装好的anaconda。
我教你编程,不是写挂一秒通关黑神话悟空游戏啊。
激光雷达ros运行
Godot 2D开放世界生存游戏 开源
ros安装过程参考及处理sudo rosdepc init 和rosdepc update两条命令无效问题2
1.7_现代CMake大型C++项目构建实战_C++ 调用自己编译的库(一)
两台电脑在没internet网络情况下,通过局域网传输文件。
ubuntu卸载vmware。
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
ubuntu安装软件包时显示"下列软件包有未满足的依赖关系" "无法修正错误,因为您要求某些软件包保持现状......"解决方法。
实名举报学员爬我的网站视频卖钱。
《松灵ROS 2开讲啦》第五期 ROS 2中常用的SLAM建图方法
更换内存条,查看电脑主板最大支持多大内存。
1.8_现代CMake大型C++项目构建实战_C++ CMake套娃_变大
卸载ros方法。
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
【研1基本功 别人不教的,那就我来】SSH+Git+Gitee+Vscode 学会了就是代码管理大师
ubuntu安装软件显示无法获得锁……无法获得dpkg前端锁……是否有其它进程正占用它?问题解决方法。
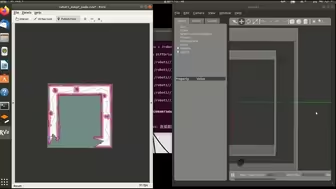
webots添加传感器简要初级操作。
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
ubuntu复制文件到另一个文件夹。
一个非常变态,但可以让你快速学会C++的方法!
一纸文件掀了我十年的事业编铁饭碗,曾经的事业编人员秒变牛马!比杀了我还难受…|事业编备考
双阿克曼小车基于简易线性MPC的曲线路径追踪仿真
虚拟机卸载已安装的操作系统。
2025工创赛物流搬运机器人 赛事解读与问题分析2
qt小操作:将写完的工程使用软件制作成程序安装包,并安装到系统。