V
主页
Gazebo机器人模型文件的语法
发布人
【持续更新中...】这系列视频合集将介绍Gazebo仿真的一些学习心得;这期视频主要介绍如何在Gazebo中搭建机器人模型;该系列视频主要以交流学习为主,视频内容,质量,制作周期远远比不上国内外的一些专业团队,当中难免会有差错,希望各位同学在评论区批评指正!!
打开封面
下载高清视频
观看高清视频
视频下载器
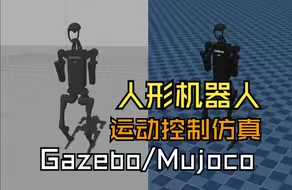
【人形机器人】在Gazebo/Mujoco中的仿真
Gazebo仿真环境搭建
Gazebo添加传感器
基于yolo和moveit的图像识别机械臂目标抓取搬移
2025工创赛物流搬运机器人 赛事解读与问题分析2
自制ros建图导航机器人2
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
宇树K1机械臂的视觉抓取仿真
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
套件教程-RTABMap之3D雷达定位与导航
《ROS自主无人机:从理论到实践》首期训练营 自主定位| 场景重建| 规划导航
2025工创赛物流搬运机器人规则分析与备赛计划
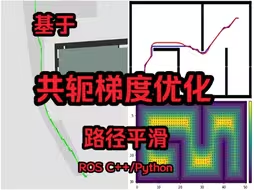
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
ROS-USB串口使用
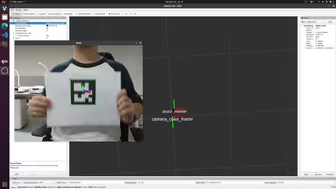
【考核用】调用opencv识别aruco码,在ros中更新tf
Gazebo加载控制器
2025年工创赛 物流搬运机器人 全流程调试
C6-2智能车的建图与自主实现教程
基于ROS双臂协同的智能物流搬运系统
ROS 颜色目标识别与定位的 Python 实现
【开源无人机】Ego_Planner程序控制飞行
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
ROS-自定义消息类型
【开源无人机】从零调试一架开源无人机
Delta机器人 标准模型控制器ROS函数库快速上手
【开源无人机】Vins_fusion代码讲解
我回来了-软路由RouterOS防火墙规则之“流量转发指定接口”
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
套件课程-RTABMap之3D雷达与RTK
【开源无人船】从零组装一艘开源ROS无人船
【开源无人机】舵机控制教学
基于ros路径规划+避障演示
2025年 物流搬运机器人 树莓派开机自启动程序
2025工创赛 物流搬运机器人场地 新鲜出炉 价格最低 质量保障
ROS机器人基于gmapping的slam自动导航建图!
2.4_ROS串口网口工具:Qt UI与串口模块连接 调试与说明_致敬国产3A游戏 _游戏引擎与物理引擎
【开源无人机】4G模块及远程连接使用教程
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
【开源无人机】vins定位手动飞行
ROS 人脸检测的 Python 实现