V
主页
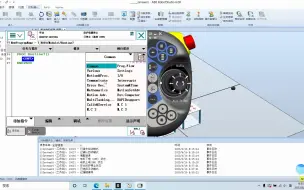
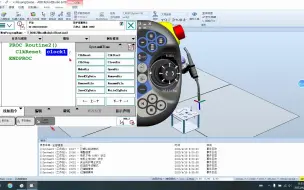
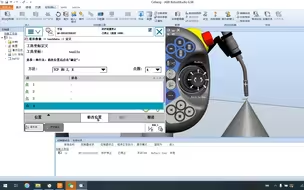
第十七期工业机器人操作员-工件坐标系的应用
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
1 ABB机器人modbus tcp远程io模块硬件接线#机器人#ABB#自动化#机电
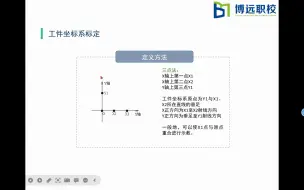
第十七期工业机器人操作员-工件坐标系的建立与验证
机器人单轴运动演示
第十六期工业机器人操作员-For循环搬运讲解
第十七期工业机器人操作员-工具坐标系的建立与验证
第十七期工业机器人操作员-Smart组件实现物块抓取
第十七期工业机器人操作员-数组搬运
第十七期工业机器人操作员-常用指令学习
第十八期工业机器人系统操作员-常用指令
第十七期工业机器人操作员-IO信号配置
第十六期工业机器人操作员-工件坐标系的建立与验证
第十七期工业机器人操作员-工作节拍与数组
第十七期工业机器人操作员-For循环搬运
第十七期工业机器人操作员-For循环搬运(巩固)
第十七期工业机器人操作员-运动指令的应用
第十七期工业机器人操作员-中断程序
第十六期工业机器人操作员-OFFS偏移指令与for循环指令讲解
第十七期工业机器人操作员-仿真软件的建模与测量
第十六期工业机器人操作员-仿真吸盘抓取动作
第十六期工业机器人操作员-轨迹示教
第十七期工业机器人操作员-激光切割项目
第十七期工业机器人操作员-工作站的建立
第十六期工业机器人操作员-人机交互指令
第十六期工业机器人操作员-选择搬运方法讲解
第十七期工业机器人操作员-人机交互指令、test、跳转指令
第十六期工业机器人操作员-机器人IO信号与工作站Smart组件信号关联
爱普生机器人第3讲 - 笛卡尔坐标系(必会)
第十六期工业机器人操作员-计时指令讲解与应用
第十六期工业机器人操作员培训- 工具坐标系的建立
数组的创建与应用
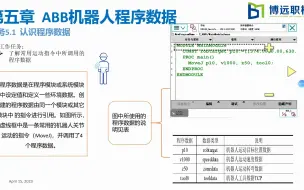
第十六期工业机器人操作员-程序性数据与运动指令
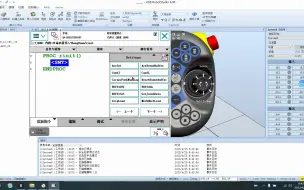
示教器的操作按键介绍
第十六期工业机器人操作员-系统称重程序
第十六期工业机器人操作员-中断程序的应用
第十六期工业机器人操作员-搬运一个物块
第十六期工业机器人操作员-仿真软件的基本操作
第十六期工业机器人操作员-跳转、标签、返回与TEST指令讲解
工具的导入与线性移动
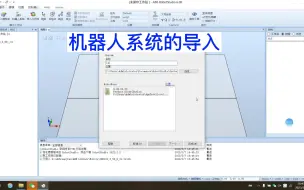
机器人系统的导入
工业机器人技能提升培训第五讲课程