V
主页
现代控制理论—状态矢量的线性变换
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
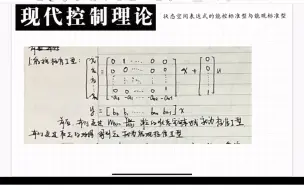
现代控制理论—状态空间表达式的能控标准型和能观标准型
现代控制理论—概述
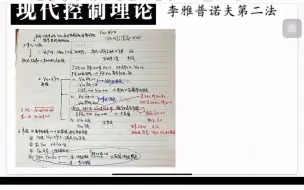
现代控制理论—李雅普诺夫第二法
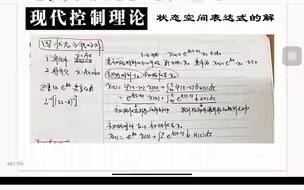
现代控制理论—状态空间表达式的解
现代控制理论—李雅普诺夫法在非线性系统中的应用
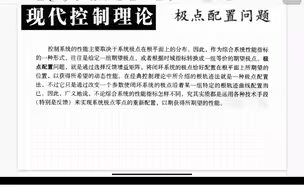
现代控制理论—极点配置问题
现代控制理论—系统的镇定问题及解耦问题
现代控制理论—系统的状态空间表达式
现代控制理论—状态观测器
现代控制理论—李雅普诺夫第一法
现代控制理论—线性反馈控制系统的基本结构及其特性
现代控制理论—李雅普诺夫关于稳定性的定义
永磁同步对拖电机Simulink控制—Adaptive Backstepping(自适应反步)控制算法讲解与实践
天津大学2017年自动控制理论
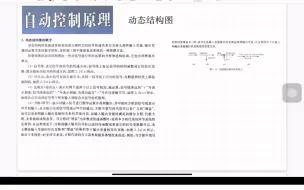
自动控制原理—结构图化简
天津大学2016年812自动控制理论
自动控制原理—非线性控制系统的描述函数法
自动控制原理—非线性控制系统的相平面分析法
自动控制原理—时域分析中动态性能的计算
天津大学2023年812自动控制理论
自动控制原理—频域分析中开环幅相频率特性曲线的绘制(Nyquist曲线)
自动控制原理—频域分析中频率特性及曲线相关概念
自动控制原理—时域分析中稳定性的判别(劳斯判据及赫尔维茨判据)
自动控制原理—频域分析中稳定裕度的计算
天津大学2018年812自动控制理论
天津大学2020年812自动控制理论
永磁同步对拖电机Simulink控制—Backstepping(反步)控制算法讲解与实践
自动控制原理—串联超前校正
自动控制原理—梅森增益公式
天津大学2013年812自动控制理论
自动控制原理—频域分析中奈奎斯特稳定性判据
自动控制原理—含放大器电路的传递函数的建立
自动控制原理—频域分析中对数稳定性判据
天津大学2019年812自动控制理论
自动控制原理—串联滞后校正
天津大学2022年812自动控制理论
自动控制原理—频域分析中开环对数频率特性曲线的绘制(Bode图)
永磁同步对拖电机Simulink控制—四电机协同控制
【盟主自控入门基础班】第2章:2-10 梅森公式的基础知识
【盟主自控入门基础班】第2章:2-8 结构图的变换