V
主页
Gazebo Simulator Tutorials with ROS
发布人
https://www.youtube.com/playlist?list=PLK0b4e05LnzbsYJ5WH-S5td2aclJqpDYo Gazebo Simulator Tutorials with ROS教程
打开封面
下载高清视频
观看高清视频
视频下载器
MoveIt! ROS Tutorials (100% Practice)
Gazebo in 5 mins
Raspberry Pi with ROS Tutorials Using Gazebo Face Simulation
ROS2 Tutorials
ROS Navigation in 5 Days
Gazebo Q&A
Advanced ROS Tutorials-Mastering ROS(FAST)
ROS SLAM小车
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
中央电视台财经频道对UniX AI进行了专题报道。
Programming for Robotics at ETH
MPC and MHE implementation in Matlab using Casadi - Workshop
QT制作的iiwa机械臂控制ui演示
(2017) Nonlinear Control Systems
ICRA复现:基于MAPPO的多机器人探索建图机制
Unitree 2024 ROS暑期学校课程视频01-四足机器人Go2开发分享
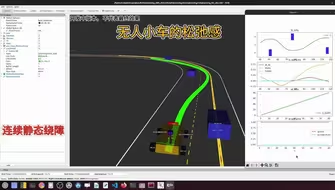
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
Coppeliasim / V-rep 教程
My Robotic Manipulator
ROS Projects
ROS Projects
重磅!把机械臂价格打下来!手搓成本仅5K的六轴达妙机械臂!【DIY乐趣】
ROS Industrial
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
Robotic Sytems (Principles and Foundations)
最后还是用amcl定位才连续成功导航了三次
SLAM算法(浙软夏令营)废柴大学生的所作所为
Introduction to Trajectory Optimization
Open AI ROS
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
Robot Modeling
[新手可入门]基于pybullet强化学习机械臂抓取仿真
From Idea To Robotics Product
ROS Manipulation in 5 Days
IROS 2020 Workshop - MIT MiniCheetah
使用相机在ROS下的TensorRT量化推理yolo模型目标检测部署
机械臂协调控制复现
基于自适应变阻抗的LBR/iiwa末端接触力跟踪
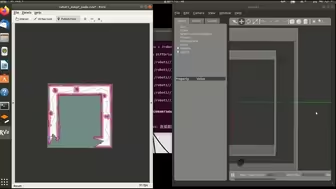
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】