V
主页
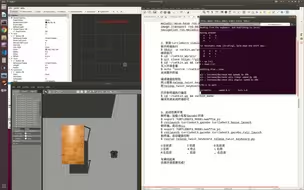
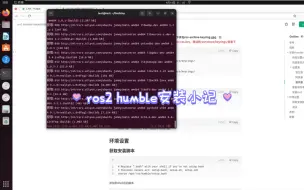
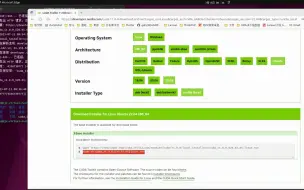
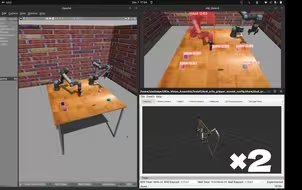
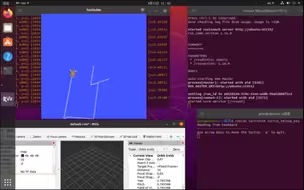
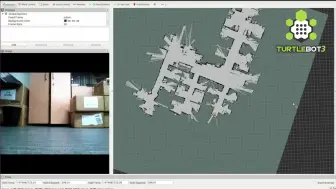
Ubuntu22安装ROS2和Turtlebot3仿真环境
发布人
安装自己的ROS2GO随身系统 https://www.bilibili.com/video/BV1kP411y7gP Ubuntu22下安装YoloV8环境 https://www.bilibili.com/video/BV1G8411S7Vk 安装ROS2 humble版 1、使用鱼香ROS一行代码方式安装ROS2 wget http://fishros.com/install -O fishros && . fishros 键入1,选择[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson) 键入2,选择[2]:不更换继续安装 键入1,选择[1]:humble(ROS2) 键入1,选择[1]:humble(ROS2)桌面版 2、安装相关依赖 sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential 3、再次使用一行代码,安装rosdep的国内源 wget http://fishros.com/install -O fishros && . fishros 键入3,选择[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用) 4、更新rosdep $ sudo rosdepc init $ rosdepc update ROS2 humble安装完毕 安装仿真环境 1、安装gazebo $ sudo apt install ros-humble-gazebo* 2、执行gazebo $ gazebo 3、成功运行gazebo后会在$HOME目录生成.gazebo配置目录 $ cd $HOME/.gazebo $ git clone https://github.com/osrf/gazebo_models.git 将gazebo_models目录更名为models即可 安装turtlebot3仿真 1、sudo apt install ros-humble-turtlebot3* 2、$ export TURTLEBOT3_MODEL=burger ## TURTLEBOT3_MODEL有burger, waffle或waffle_pi三种 3、建图 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True ros2 run turtlebot3_teleop teleop_keyboard ros2 run nav2_map_server map_saver_cli -f ~/map 保存地图 然后推出全部终端 4、导航 ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True map:=/home/hjx/map.yaml 这时发现rviz2无法正常显示并且终端一直在报错 进入目录/opt/ros/humble/share/turtlebot3_navigation2/param 里面有3个yaml配置文件对应三种不同机器人模型,修改配置文件内第29行 内容"robot_model_type: "differential" 变为robot_model_type: "nav2_amcl::DifferentialMotionModel" 地图就可正常显示
打开封面
下载高清视频
观看高清视频
视频下载器
Ubuntu24安装ros2 写了个安装脚本一键安装方便快捷
ros2+gazebo+liosam+nav2导航仿真实现
ROS2 Humble基本使用
【鱼香ROS】动手学ROS2|ROS2基础入门到实践教程|小鱼带你手把手学习ROS2
如何用一行代码安装完成ROS2,鱼香ROS网站即将上线
ros2 humble + gazebo 环境下实现自动驾驶仿真
Ubuntu22.04安装Ros2 humble重新录制版
【古月居】古月·ROS2入门21讲 | 带你认识一个全新的机器人操作系统
ROS-2. Turtlebot 3 硬件与开发环境配置第三课
ubuntu沉浸式安装ROS!
ubuntu22安装ros2-humble(LTS)
ROS2入门:小海龟的安装与操作指南
【机器人操作系统】ROS与ROS2.0区别是什么
ROS2 Jazzyz 安装方法(最新版本,保姆级教程)
十分钟的ROS2安装方法
在Ubuntu22.04上安装ROS2 Iron
14个ROS/ROS2版本任选 | 用Docker实现一键安装ROS
ubuntu22.04 install ros2-humble
不用装虚拟机双系统,三分钟让你拥有一个ROS随身系统
turtlebot3仿真环境安装
第17h 学ROS2的入门教程 成功在Ubuntu安装ROS2 并跑了几个教程小案例【创业者机器人学习笔记】
Ubuntu22.04安装ros2 Humble Hawksbill
ROS2 初级教程: 安装
Ubuntu22下安装YoloV8环境
ROS2基本使用(C++)
ROS2+Gazebo双UR5e机械臂YOLOv5视觉抓取仿真
注意!新装ubuntu22.04必做两件事,不然可能没法用!
Ubuntu20.04安装turtlebot3并运行slam例程仿真
玩着游戏听着歌,就把ROS装好了!一行代码搞定系列!
安装ROS2和Navigation2(12-06-2023)-ubuntu22
手把手学ROS2 Humble
【Turtlebot3-Burger 智能机器人】Turtlebot3 汉堡ROS开源智能小车视频教程 新手必看
ROS机器人 Noetic版本 ROS系统安装 虚拟机版 Ubuntu20.04 ROS 保姆级教学视频 第二期 2021年2月更新
【大干货】10分钟搞定ROS机器人操作系统安装
VMware虚拟机安装Ubuntu22.04.2操作系统教程
Windows 和 Ubuntu 双系统的安装和卸载
ubuntu20.04虚拟机10分钟快速安装ROS
TurtleBot3 官方视频
Ubuntu安装详细教程
在Ubuntu20.04上安装ROS机器人操作系统-Noetic