V
主页
京东 11.11 红包
智能机器人中的物理模型
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
从物理互动中学习结构化世界模型
CXL内存优化AI推理
家庭通用机器人
自适应协作机器人
MIT机器人操作Lecture 2
RISC-V Microprocessors
开源通用机器人构建
边缘AI
Google,Data Centers of the Future
Seminar in Computer Architecture 2024,计算机架构的未来 II 和基因组分析 3
数字实验室做机器人及模拟机器人开发
机器人空间感知基础
字节万级GPU集群LLM训练
机器人学习中运动表示
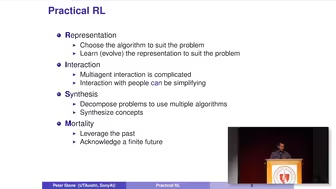
[RLC 2024] Peter Stone,实用强化学习:30 年研究的经验教训
将CMS组合内存系统集成到存储密集型任务中
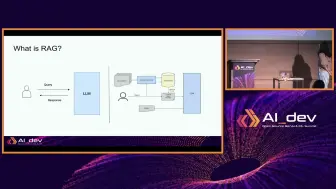
边缘云端高效的LLM推理
Seminar in Computer Architecture 2024,基因组分析II和数据驱动的微架构 4
DéjàVu: 稀疏上下文的高效LLM推理服务
[SIGCOMM2023] : Offloading
Princeton机器人Lecture10:动态约束下的规划
Stanford CS25: Robotics and Imitation Learning
超材料类蛇直线运动机器人
机器人可达性研究
SIGCOMM2024,CacheGen 用于快速模型服务的KV缓存压缩和流式处理
适用于 GenAI 工作负载的以太网结构
凸集图及在最优控制和运动规划中应用
[CoRL2023] OOD Workshop: 如何在分布之外泛化机器人
[CVPR24 Vision Foundation Model tutorial] 多模态模型构建通用多模态助手
Geometric Regularizations for 3D Shape Generation
MuxServe:灵活的多路复用实现高效的多个LLM服务
机器人控制的不同鲁棒性观点
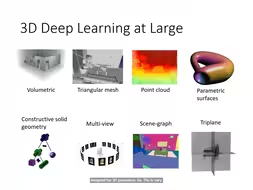
下一代机器人感知:3D场景图,可验证算法,自监督学习
非稳态环境中的安全RL:理论与算法
通用机器人路径思考:scaling law、数据飞轮和具身智能
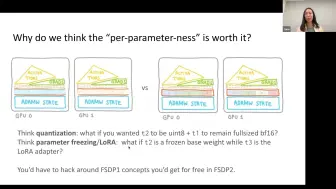
Slaying OOMs with PyTorch FSDP and torchao
行业视角看AI 机器人的发展
[CoNEXT2023] Datacenter
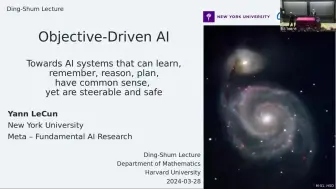
目标驱动AI: Towards AI systems that can learn, remember, reason, and plan
TPUv4i