V
主页
京东 11.11 红包
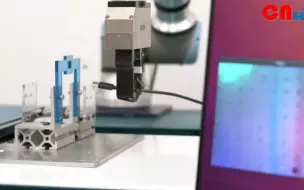
Actin控制软件通过实时路径规划和运动控制,对 UR5E 机器人的取放任务及无碰撞作业进行优化。
发布人
Actin控制软件通过实时路径规划和运动控制,对 UR5E 机器人的取放任务及无碰撞作业进行优化。
打开封面
下载高清视频
观看高清视频
视频下载器
Actin软件驱动下的 UR5E机器人双臂协作,共享空间内的双臂无干涉、无碰撞协作
Franka Research 3:前沿人工智能与机器人研究的全新 7 轴力控机械臂首选平台
光学三轴触觉力传感器再现“ 江湖 ”-Contactile三轴触觉力传感器让机器人更智能(3×3阵列传感器)
SMARTSHIFT机器人纯机械自动快换机器人末端工具切换——快!准!稳!
FANUC发那科机器人编程(共18集)
UR10e协作机器人--赋予了它全新的部署功能
Gelsight mini 机器人触觉传感器实测Demo
Gelsight 创始人亲自介绍机器人视触觉传感器仿生原理
Mimic机器人实时路径示教利器—复杂轨迹示教
TouchDiver Pro触觉手套震撼上市!TouchDiver Pro触觉手套震撼上市! Weart触觉反馈手套,重塑XR应用沉浸感! 全新升级SDK,强大
Mimic机器人实时路径示教利器—轨迹示教
Sensodrive 为何在定制医疗机器人开发中可以大幅缩短产品上市时间?
优傲协作机器人UR20震撼发布!重新定义工业协作机器人自动化
德国公司MBO Postpress Solutions将UR10e协作机器人整合进了其CoBo-Stack堆垛协作机器人系列中
GelSight Mini视触觉传感器重磅发布!一款适用于机器人工程师和科学家的超高分辨率视触觉传感器
TouchDiver Pro触觉手套震撼上市! Weart触觉反馈手套,重塑XR应用沉浸感! 全新升级SDK,强大通用,开启触觉体验新纪元!
kinova gen3 lite 教育机器人简介
SenseGlove 力反馈数据手套Nova 2,虚拟触感真实,助力 XR 与机器人训练
Robotiq机器人电动抓手—大力电手,适用于各种工件和场景 两指电爪:2F-85、2F-140、Hand-E和三指电爪
Piezo Motion--直线压电电机
Tesollo三指灵巧手Delto-3F,具备12个全驱自由度,可进行相当灵巧的手上操作,并轻松处理各种形态和材质的物体。
Tekceleo微型压电电机在微型串联和并联机器人上的应用
具身智能的Mobile ALOHA机器人的遥操作作业
Piezo Motion--压电旋转电机
分享免费,无需翻墙,无限次数使用的ChatGPT3.5和GPT4.0安装教程教程!
Cyberith行走动捕模拟器 Virtualizer重塑人形机器人运动学习曲线 全身动捕与VR遥操作技术融合提升人形机器人运动技能
工业机器人入门之PLC、ABB robot studio、MCGS联合仿真
Gelsight视触觉传感器在美国如何赋能机器人抓取和操作更智能
Manus 数据手套产品发布
光学三轴触觉力传感器再现“ 江湖 ”-Contactile三轴触觉力传感器让机器人更智能(单点传感器)
收卷控制
Tesollo 三指灵巧手 DG-3F:拧紧操作显卓越,指尖吸盘创非凡,移液操作提效率
Cyberith运动模拟器的VR和机器人遥操作应用视频
1.1 KUKA(库卡)-官方工程师培训1 《机器人选型介绍 (上)》
UR机器人+minic示教神器--点胶涂胶好帮手
深夜,机器人贩子几句话就拐走了其他机器人
NIRYO开源教育机器人之AI识别和定位
工业机器人如何学?什么时候学?郑鼎侯老师ABB工业机器人视频
235 使用 Fanuc 机器人进行码垛、混合和卸垛过程
BOTA用于全驱动飞行器接触式检测的主动交互力控制--无人机接触式NDT检测力控应用