V
主页
京东 11.11 红包
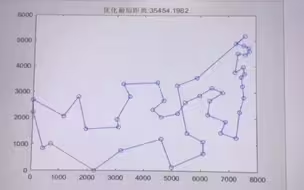
多因素改进蚁群算法的移动机器人路径规划
发布人
网络 多因素改进蚁群算法的移动机器人路径规划。 是一篇paper的复现,主要从路程、转弯、平滑性三方面综合考虑最优路径。 可以用来学习,也可以用来做对比算法 地图可以任意修改,起点终点也可以任意修改
打开封面
下载高清视频
观看高清视频
视频下载器
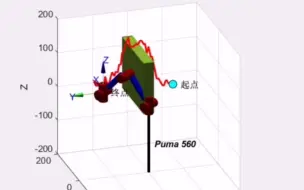
机器人学 机器人轨迹规划 基于蚁群算法的路径规划
智能优化算法 蚁群算法求解路径规划问题报告
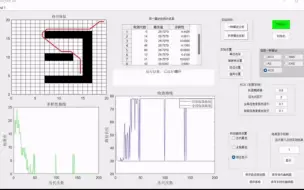
蚁群算法 路径规划matlab 设计的gui界面
基于蚁群算法的路径规划算法开发
基于matlab实现改进的人工势场法,apf算法进行路径规划,通过改进斥力函数和引入模拟退火算法,克服局部极小值和目标不可达问题
基于贝塞尔曲线换道路径规划及跟踪控制carsim simulink 联合仿真,路径跟踪控制器可选LQR,MPC,PP算法
基于Tent映射的混合灰狼优化算法(三个改进点) MATLAB
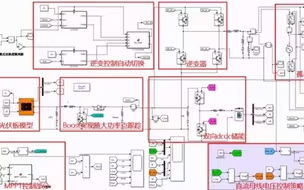
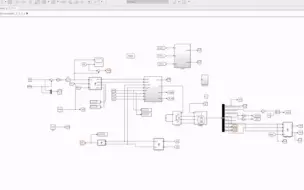
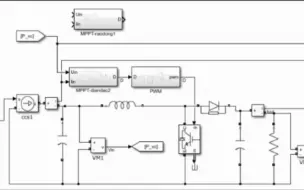
光伏发电mppt+boost+储能+双向dcdc+并网离网自动切换模型
路径规划算法,Matlab实现A星算法
人工势场法,根据斥力和引力规划出路径,地图可以更改
A3D 路径规划算法 matlab
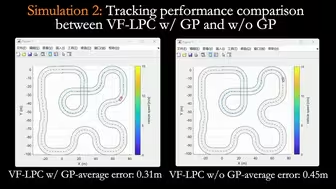
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
向量场引导的无人车学习预测运动规划算法
滑动平均算法
PMSM永磁同步电机参数辨识仿真,适用于表贴式,内嵌式永磁同步电机
基于地形的路径规划案例
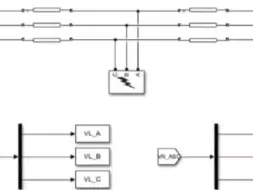
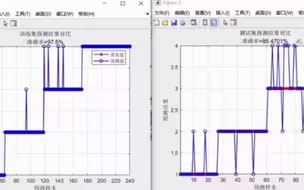
输电线路故障双端测距
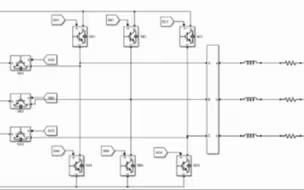
三相PWM整流器仿真,PI双闭环控制,电流可双向流动参考张兴的PWM整流器
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
NMPC非线性模型预测控制从原理与代码实现
直流无刷电机源码和无刷电机原理图
04_PID改进讲解-1
模块化多电平变换器MMC
基于matlab的LMS自适应滤波算法
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
三阶线性自抗扰控制器
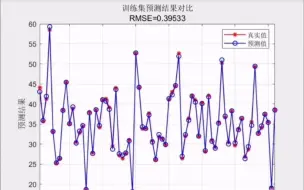
基于levy飞行和模拟退火改进的秃鹰搜索算法优化极限学习机(IBES-ELM)的数据回归预测
ANPC仿真SVPWM中点平衡
基于BP神经网络的数据分类预测模型
永磁同步电机模型预测模型(预测电流、预测磁链)
三电平逆变器带不平衡负载负载仿真
光伏模块采用基础原理公式搭建
四分之一二自由度主被动悬架建模分析
光伏电池仿真模型
拓展卡尔曼滤波EKF,估计电池SOC
11kw车载充电机设计
6kw-10kw成熟UPS电源逆变器设计方案
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
灰色预测gm(1,1)模型
永磁同步电机(PMSM)设计案例(V型磁钢)