V
主页
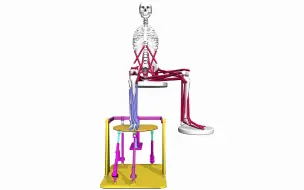
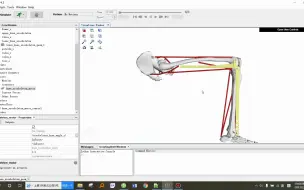
基于OpenSim的人体骑车生物力学仿真
发布人
基于OpenSim正向动力学的人体骑车生物力学仿真
打开封面
下载高清视频
观看高清视频
视频下载器
opensim_基础教程01
基于OpenSim对太极拳的运动生物力学仿真研究
opensim人体搬运重物仿真
从solidworks软件中导入几何模型至opensim中进行仿真流程
基于OpenSim及MATLAB的髋关节外骨骼助力仿真
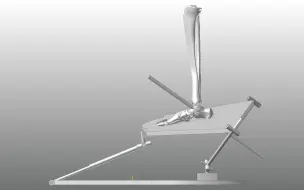
基于OpenSim的踝关节康复机器人康复仿真
基于OpenSim的踝关节外骨骼仿真视频
opensim_运动生物力学人体舞蹈
opensim人体7杆模型运动仿真
OpenSim人体皮肤肌肉骨骼一体化模型
基于OpenSim的包含皮肤的人体模型运动仿真
solidworks与opensim人机耦合仿真
基于OpenSim的外骨骼助力仿真
OpenSim 基础教程02
OpenSim 基础教程03
基于OpenSim的人机耦合康复仿真
OpenSim 基础教程04
opensim_人体舞蹈
基于OpenSim的外骨骼辅助机器人仿真
基于opensim的并联踝关节康复机器人仿真
包含人体皮肤的opensim生物力学模型
基于OpenSim的闭合运动链机构仿真分析及验证
OpenSim基础教程05
基于OpenSim生物力学软件的踝关节康复机构的人机耦合仿真
基于OpenSim与MATLAB的踝关节外骨骼人机耦合助力仿真
基于MATLAB的挖掘机动力学及运动学仿真界面
双层stewart
松下6自由度并联机器人solidworks运动仿真展示动画
并联机器人逆动力学控制(IDC)仿真
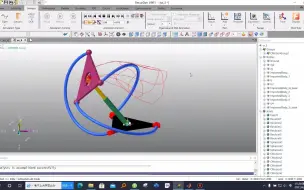
2自由度并联腕关节(3-UU或3-4R机构)运动及工作空间仿真
recurdyn柔性绳索仿真展示动画
并联康复机构
一种(2R1T)RCM并联机构
3sps/3rsr并联稳定平台展示
3-UPU并联运动模拟器simscape
3us/upu 2转动并联机构的工作空间
3RSR并联运动模拟器产品介绍视频
3-RPS并联机构工作空间及其验证
3-UPU 展示动画
定点转动(2R1T)RCM并联机构