V
主页
六自由度机械臂正逆解分析及写汉字仿真(二)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
我要上浙大!请大家监督我! Day 147 7月27日
网友评选出的最差专业排名!
结合数十万考生的真实情况分析13个考研数学共性问题
广勾股定理?我真没了解过……有点小尴尬……
今年来19所大学拟撤销或停招99个本科专业,专家:估计明年调整力度也很大
“数学女友”的高数诀窍 拿下专业第一
15岁高三天才少年沉迷游戏,数学考130多分备受打击,张老师直言给其他同学留条活路吧
高考失利考了269分,和父母吵架后决定准备在家复读高四了,三十年河东,三十年河西,莫欺少年穷。
急急急!录取通知书终于寄出了!
苦思三天三夜,我发现学历贬值是一个机会
广东以色列理工学院录取通知书开箱
如何优雅地证明e大于根号7?
【张雪峰】考研指南:讲解考研的流程
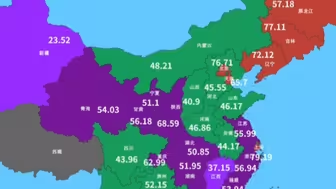
2023年高考各省本科上线率
圆锥曲线 二级结论与奇特方法篇,有用的全覆盖
一个2024清华本科录取通知书开箱(。ò ∀ ó。)
【干货】又出生在职高厕所怎么办?
本科混子跨考一战上岸985计算机经验贴(数学篇)
23岁清华退学,复读半年考入中山,我终于想通了这些
一个很变态,但杀死作文45分循环的思辨方法
25考研报名时间发布
材料专业,考研就业选这4个方向,钱途也不错!
教大学牲生活之,怎样通过尿液颜色,判断身体状况
开学季,平板到底是假需求还是真实用
这3类专科生,劝你别去专升本!
【全471集】清华大佬终于把高中物理做成动画片了,学完变学霸!拿走不谢,这还行不会这没办法了!
【协和6年】读博而已,还是开心点啦~
“虽然下午了,但我今天已经学了2小时了,这公务员我应该能考上吧?”
30分钟零基础程序员(前端)速成,我收藏了
【P1】九上数学2025必刷题持续更新中!
破大防了!原来这些专业真的考不了公务员,为什么报考的时候没人早点告诉我!
投稿SCI论文前一定要干这4件事!
准高一必须知道的高中九科难度排名
张雪峰谈中外合作办学,这信息量太大了
看网课,毁了很多人的高中。三大雷区踩了一个,都会前功尽弃
大学新生学高数的教材推荐
聊聊我高一是怎么烂掉的?
同学和辅导员关系贼好,我要不要也搞搞关系…
求半径
两眼一黑!体制内最忙最牛马的五大岗位,最后一个就能劝退90.99%的公务员!