V
主页
京东 11.11 红包
Fa15 ECE 6320 Lecture 21 Multi-agent control
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
03-04 Concurrent Metatem - A Logic-based Multi-agent Programming Language
02-08 How to tell an agent what to do (without telling it how to do it)
多智能体协同分布式控制和优化Decentralized Control and Optimization of Cooperative Multi-Agent
01-03 Agents and MultiAgent Systems A First Definition
01-01 Introducing MultiAgent Systems
Introduction to the Fourier Transform (Part 2)
Sketching Root Locus Part 2
Control Systems Lectures - Transfer Functions
Final Value Theorem and Steady State Error
非线性系统的观测器Observer Design for Nonlinear Systems: A Tutorial (Dr. Rajesh Rajamani)
Nokia Distinguished Lecture_ Richard Murray on Cyber-Physica
The Root Locus Method - Introduction
同步协同控制Cooperative Control Synchronization (Dr. Frank Lewis)
多机器人系统协同Cooperative Multi-Robot Systems (Dr. Jeff Shamma)
Nyquist Stability Criterion Part 1
Why Learn Control Theory
Advancing Innovations for Robotic Teams in Complex Environments
高增益观测器High-Gain Observers in Nonlinear Feedback Control (Dr. Hassan Khalil) P1
20201014 【尖端講座系列】第十場 神話與歷史
三、保证--作风优良
01-05 Objections to MultiAgent Systems
03-01 Agent Architectures
分布式优化Distributed Optimization over Networks (Dr. Maria Prandini)
Decentralized Control and Optimization in the Internet of Cars (Part B)
多智能体系统控制 第五章 线性系统的一致性算法设计(二阶积分器) 01
第八届全国高校大学生讲思政课公开课参赛作品——《理想铸就精神丰碑,信念点亮未来希望》(完整版)
高增益观测器High-Gain Observers in Nonlinear Feedback Control (Dr. Hassan Khalil) P2
Control Systems Lectures - Time and Frequency Domain
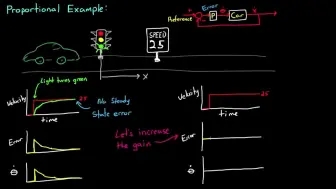
Simple Examples of PID Control
[LeetCode] 334. Increasing Triplet Subsequence 递增三元组子序列
02-03 Objects and Agents
陀螺仪单轨列车,但是普乐路路(搬运)
Fundamentals of Reinforcement Learning
【MIT中国峰会】Dina Katabi
#Programming Foundations with Python_1 What Will We Create
多智能体一致性带输入饱和约束论文讲解
02-06 A Formal Model of Agents and Environments
进化的力量·刘润年度演讲2024(高清)完整
Vehicle Modeling Using Simulink