V
主页
京东 11.11 红包
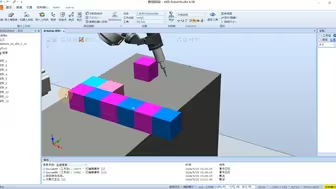
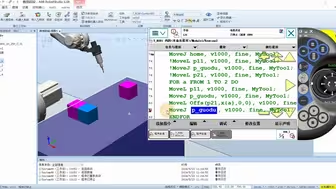
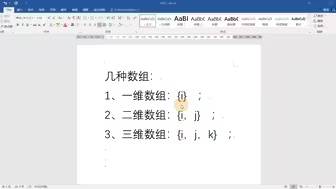
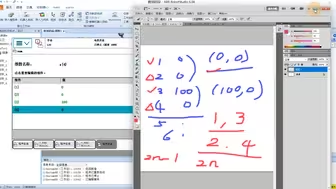
数组的理解和运用-7-三维数组在xy方向的运用
发布人
数组的理解和运用-7-三维数组在xy方向的运用
打开封面
下载高清视频
观看高清视频
视频下载器
数组的理解和运用-8-三维数组在xyz方向的运用
数组的理解和运用-5-二维数组在xy方向的运用
数组的理解和运用-4-二维数组在单方向的运用
数组的理解与运用-2-一维数组在x和y方向的固定取值
数组的理解与运用-1-一维数组在单方向的运用
数组的理解和运用-6-二维数组在xyz方向的运用
数组的理解和运用-3-一维数组在x和y方向的公式表达
数组的理解和运用-9-一维数组独立创建后在xyz方向的灵活运用
PlantSimulation的基本操作-7-编辑图标
第09课【C语言二维数组和推箱子】二维数组概念, 二维数组初始化方式,三维数组,推箱子项目实战
机器人码垛-拓展-用num数组完成传送-吸取-放置2层的动作
机器人码垛-第4步-子程序-取放z方向2个物料-数组目标点
机器人码垛-第2步-设置放置数组目标点
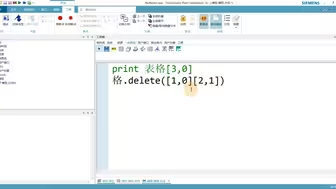
PlantSimulation的数据表格与method编程-7-delete表格指定内容
PlantSimulation的AGV小车-7-轨道-目标工位Destination与传感器
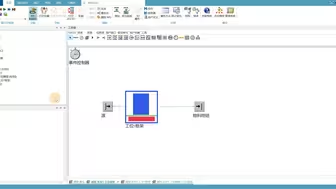
Multisim14仿真软件的基本运用-电源和开关和灯泡
robotstudio的ABB机器人IO信号在程序中的简单运用的讲解
PlantSimulation的基本编程操作-7-repeat-until语句的编程
第08课【C语言一维数组】数组是什么?普通遍历和数组的区别,数组的定义和初始化,数组实现元素的添加,冒泡排序
ABB机器人控制柜与本体的连接简介
opt机器视觉smart3的基本操作-标定-9点标定
PlantSimulation的基本操作-5-装配工位
PlantSimulation的基本操作-1-添加工位及仿真
plant_simulation工厂仿真软件1-基本简介
robotstudio工件坐标运用中的区别
机器人码垛for循环使用xyz表达式-第1步
Multisim仿真-三人表决器
电感L的参数计算实例
三人表决器电路简介
OPT的机器视觉smart3的安装
机器人码垛-第1步-吸盘从传送带设置取放目标点
UE4绘制手游世界数组快速定位优化
robotstudio的程序if语句的简单讲解
你知道仅用函数就能实现数组、对象甚至数字吗?
PlantSimulation的基本操作-2-添加传送器
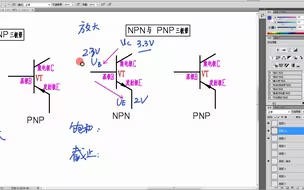
npn三极管的饱和与截止状态的判断
零基础C++(17) C风格数组和字符串用法
吸盘工具的创建及设置-第2步-smart组件创建
robotstudio的tcp工具坐标的创建的简单讲解
3D打印入门与基础-所需的工具